JGY-PCB01 –Ά ΙΛ‰I(y®®)ôCΤς»Υ PCB °ê–Έ≤εΦΰΙΛΉς’Ψ
“ΜΓΔΙΛ‰I(y®®)ôCΤς»Υ PCB °ê–Έ≤εΦΰΙΛΉς’Ψ‘îΦöΦΦ–g(sh®¥)ÖΔîΒ(sh®¥)
1. ΙΛ‰I(y®®)ôCΤς»Υ±ΨσwΘΚ
ABB IBR120/3 ΝυΉ‘”…Ε»ΙΛ‰I(y®®)ôCΤς»Υ±Ψσw��ΘΜΉν¥σΊ™ίdΓί 3 kg ���ΘΜ Ήν¥σ±έ’ΙΑκèΫΓί 580mm ���ΘΜ ίSîΒ(sh®¥)ΘΚΓί 6 ίS����ΘΜΈΜ÷Ο÷ΊèΆ(f®¥)ΨΪΕ»ΘΚ®Q 0.01mm ��ΘΜ ΖάΉoΒ»ΦâΘΚ Γί IP30 �����ΘΜ
ίSΏ\³”ΖΕ΅ζΘΚ
Θ® 1 Θ© 1 ίSΘΚΓίΓά 165 Γψ
Θ® 2 Θ© 2 ίSΘΚΓίΓά 110 Γψ
Θ® 3 Θ© 3 ίSΘΚΓί +70 Γψ÷Ν -110 Γψ
Θ® 4 Θ© 4 ίSΘΚΓίΓά 160 Γψ
Θ® 5 Θ© 5 ίSΘΚΓίΓά 120 Γψ
Θ® 6 Θ© 6 ίSΘΚΓίΓά 400 Γψ
ôCΤς»Υ±Ψσw÷ΊΝΩΘΚΓή 25kg ���ΘΜ Ήν¥σ‘κ“τΘΚΓή 70dB(A) ΓΘ
2. ΙΛ‰I(y®®)ôCΤς»ΥΩΊ÷ΤΤςΘΚ
• Ψo€ê–ΆΙΛ‰I(y®®)ôCΤς»ΥΩΊ÷ΤΙώ�Θ§≈c≈δΧΉΒΡΙΛ‰I(y®®)ôCΤς»Υ±Ψσw≈δΧΉΘΜ
• ΩΊ÷Τ”≤ΦΰΘΚΕύΧéάμΤςœΒΫy(t®·ng)¥σ»ίΝΩιW¥φ����ΓΔ UPS ²δΖίκä‘¥Θ®Γί 20S Θ©ΘΜ
• ΩΊ÷Τή¦ΦΰΘΚή¦Φΰ≥ωèSνA(y®¥)―b�����ΘΜ
• ν~Ε®ΙΠ¬ ΘΚΓί 3KVA( ΉÉâΚΤς»ίΝΩ ) ΘΜ
• κä‘¥ίî»κΘΚ 200V/230V 50-60Hz
• ≥Ώ¥γΘΚ 710*449*442mm
• ÷ΊΝΩΘΚ 30kg
• ΖάΉoΒ»ΦâΘΚ IP20
3.FlexPendant ΨΫΧΤς
• ÷ΊΝΩΘΚ 1kg
• ÷ß≥÷ΘΚ≤ …Ϊ”|ΟΰΤΝ�ΓΔ≤ΌΩv½UΘ§ΨoΦ±ΆΘ���ΓΔ÷ß≥÷ëT”ΟΉσ / ”“ ÷«–™Q�����Θ§÷ß≥÷ U ±P���ΓΔüα≤εΑΈΓΔΜ÷èΆ(f®¥)≥Χ–ρ�����Θ§÷ß≥÷ USB ÉΠ¥φΤς��Θ§éßïrιg‰Υ(bi®Γo)”¦Β«δ¦�Θ§÷ß≥÷Ώh≥ΧΖΰ³’(w®¥)ΓΘ
4. Ωλ™QΙΛΨΏ 1 ΧΉ
Θ® 1 Θ©ΙΛΨΏΩλ™QœΒΫy(t®·ng)ΘΚΩ…¨ç§F(xi®Λn)≤ΜΆ§ΙΛΨΏιgüo–η»ΥûιΗ……φΉ‘³”Άξ≥…«–™Q�Θ§Γί 6 ¬Ζöβ³”–≈Χ•Θ§ν~Ε®Ί™ίdΓί 3kg �����Θ§ΚώΕ» 38mm Γά 5mm Θ§÷ΊΝΩ 125g Γά 20g ���ΓΘ
Θ® 2 Θ©Ρz‰¨ΙΛΨΏΘΚΚ§”–ΙΛΨΏΕΥΩλ™QΡΘâK≈cΩλ™QΡΘâK≈δΧΉ���Θ§Ω²ιL 140mm-150mm Θ§ΆβöΛûιδXΚœΫπ≤ΡΌ|(zh®§)�����ΓΘ
Θ® 3 Θ©äAΉΠΙΛΨΏΘΚΩ²ιL 140mm Γά 2mm ���Θ§É»(n®®i)èΫ 20mm Γά 2mm Θ§÷ΊèΆ(f®¥)ΨΪΕ»ΗΏ”ΎΓά 0.01mm �Θ§ι]ΚœäA≥÷ΝΠΓί 45N Θ§ι_ι]––≥Χ 10mm Γά 2mm ���ΓΘ
Θ® 4 Θ©Έϋ±PΙΛΨΏΘΚΩ²ιL 110mm Γά 2mm ��Θ§ΫY(ji®Π)‰΄(g®Αu)ûιδXΚœΫπ≤ΡΌ|(zh®§)���Θ§™μ”–÷±èΫ 4mm Γά 1mm Έϋ±P 1 ²ÄΜρ 1 ²Ä“‘…œ���Θ§÷±èΫ 20mm Γά 2mm Έϋ±P 2 ²ÄΜρ 2 ²Ä“‘…œΓΘ
Θ® 5 Θ©φi¬ίΫzΙΛΨΏΘΚΫY(ji®Π)‰΄(g®Αu)ûιδXΚœΫπ≤ΡΌ|(zh®§)�����Θ§Ω²ιL 360mm Γά 2mm ���Θ§≈ΛΝΠ 0.19Nm~0.78Nm ��Θ§όD(zhu®Θn)ΥΌ 2200r/min-2500 r/min ÷°ιg��ΓΘ
5. ΆΩΡzÜΈ‘Σ 1 ΧΉ
1) 3D ήâέEàDΑε≥Ώ¥γ 440mm ΓΝ 250mm Θ®Γά 2mm Θ©����Θ§ΨΏ”–ΑκΫ¦(j®©ng) 50mm Γά 2mm ΒΡΙΑ–ΈΟφ�����Θ§≤ΡΌ|(zh®§)ûιΧΦδ™ΩΨΤαΜρδXΚœΫπ��Θ§ΚώΕ» 3mm Γά 0.5mm ����ΓΘ
6. ¥aΕβÜΈ‘Σ 1 ΧΉ
Θ® 1 Θ©≈_Οφûι POM ΜρδXΚœΫπ�����Θ§≥Ώ¥γ 110mm ΓΝ 110mm ΓΝ 15mm ιL¨£Γά 20mm �����Θ§ΗΏΓά 5mm ����Θ§≤…”ΟδXΚœΫπ–Ά≤Ρ÷ß™Έ�����Θ§ΗΏΕ» 160mm Γά 20mm �����ΓΘ
Θ® 2 Θ©ΑϋΚ§ΡΘîMΈοΝœ��Θ§≤ΡΌ|(zh®§) PVC ΜρδXΚœΫπ��Θ§≥Ώ¥γ 65mm ΓΝ 32mm ΓΝ 15mm Θ®Γά 5mm Θ©�Θ§îΒ(sh®¥)ΝΩΓί 8 ²Ä�ΓΘ
7. “ï”Xôz€yÜΈ‘Σ 1 ΧΉ
Θ® 1 Θ©“ï”Xôz€y≤…”Ο CCD ≈Ρ’’ôz€y�Θ§”––ßœώΥΊîΒ(sh®¥)Γί 1600 ΓΝ 1200 ����Θ§≤ …Ϊôz€yΘ§îzœώΟφΖeΓί 7.0mm ΓΝ 5.4mm ���Θ§àωΨΑîΒ(sh®¥)Γί 120 ²Ä��Θ§Ω…¥φÉΠàDœώîΒ(sh®¥)Γί 40 èà���Θ§Ω…άϊ”ΟΝς≥ΧΨéί΄ΙΠΡή÷ΤΉςΧéάμΝς≥ΧΘ§÷ß≥÷¥°–– RS-232C ΚΆΨW(w®Θng)Ϋj(lu®Α) Ethernet Ά®”ç�Θ§ΧαΙ©ΗΏΥΌίî»κΓί 1 ϋcΓΔΗΏΥΌίî≥ωΓί 4 ϋc�����ΓΔΆ®”Οίî»κΓί 9 ϋcΚΆΆ®”Οίî≥ωΓί 23 ϋcΒΡ≤Δ––Ά®–≈����Θ§ΧαΙ© DVI-I ±O(ji®Γn)ΩΊίî≥ωΓΘ
Θ® 2 Θ©ΧαΙ©≠h(hu®Δn)–ΈΙβ‘¥�Θ§É»(n®®i)àA÷±èΫ 90mm Γά 5mm Θ§ΆβàA÷±èΫ 120mm Γά 5mm Θ§Ι©κäκäâΚûι÷±Νς 12V Μρ 24V ����ΓΘ
Θ® 3 Θ©“ï”Xôz€yΫY(ji®Π)ΙϊΚΆ≤…Φ·àDœώ–≈œΔΆ®Ώ^Γί 12 ”Δ¥γο@ ΨΤςΦ¥ïrο@ ΨΘ§ΖΫ±ψ“ï”Xôz€yÖΔîΒ(sh®¥)’{(di®Λo)’ϊΚΆ†νëB(t®Λi)±O(ji®Γn)ΩΊ�ΓΘ
8. ―b≈δôz€yÜΈ‘Σ 1 ΧΉ
Θ® 1 Θ©Α≤―bôz€yΙΛΈΜ’ϊσw≥Ώ¥γûι 410mm ΓΝ 190mm ΓΝ 180mm Θ®Γά 20mm Θ©Θ§ΫY(ji®Π)‰΄(g®Αu)ûιδXΚœΫπ≤ΡΌ|(zh®§)�ΓΘ
Θ® 2 Θ©Α≤―bΤΫ≈_Α≤―b‘ΎκpΝ–ΨÄ–‘Μ§ήâ…œΘ§¨£Ε» 9mm Γά 1mm �����Θ§ιLΕ»Γί 300mm ���Θ§≤…”Οöβ³”ρ¨(q®±)³”����Θ§É»(n®®i)èΫ 16 Γά 1mm �����Θ§”––ß––≥ΧΓί 200mm ���Θ§Α≤»Ϊ±Θ≥÷ΝΠΓί 140N ΓΘ
Θ® 3 Θ©ôz€y÷ßΦή…ΐΫΒ≤…”Οöβ³”ρ¨(q®±)³”Θ§É»(n®®i)èΫ 16mm Γά 1mm �����Θ§”––ß––≥ΧΓί 20mm ���Θ§Α≤―b”– LED ¨ß(d®Θo)ΙβΑε����Θ§≥Ώ¥γûι 100 Γά 10mm ΓΝ 100 Γά 10mm ΓΝ 1.5 Γά 0.5mm �Θ§Ω…‘Ύôz€yΏ^≥Χ÷–ΝΝΤπΓΘ
9. ¬ίΫzΙ©ΝœÜΈ‘Σ 1 ΧΉ
Άβ–Έ≥Ώ¥γ 360 Γά 20mm ΓΝ 250 Γά 10mm ΓΝ 160 Γά 10mm �Θ§ίîΥΆΥΌΕ» 0.3s-0.8s/ νwΘ§Ώm”Ο¬ίΫz“é(gu®©)Ηώ M2~M5 ���Θ§Ήν¥σ¬ίΫzιLΕ» 20mm
10. ‘≠ΝœΝœéλ 1 ΧΉ
ÜΈ¨”Ι≤ 4 ²ÄΝœÖ^(q®±)�Θ§Ω…Ζ÷³e”Ο”Ύ¥φΖ≈°ê–Έ–ΨΤ§ΝψΦΰ�����ΓΔ…wΑεΚΆ PCB κä¬ΖΑε�Θ§É»(n®®i)àAΑκèΫΓί 500mm ΓΘ
11. κäΉ”°a(ch®Θn)ΤΖ PCB κä¬ΖΑε 5 ΧΉ
Θ® 1 Θ© PCB κä¬ΖΑε��Θ§≥Ώ¥γ 120mm ΓΝ 120mm Θ§Κώ 12mm ����ΓΘ
Θ® 2 Θ©…wΑεΘ§≥Ώ¥γ 120mm ΓΝ 120mm ��Θ§Κώ 5mm �ΓΘ
12. ≤ΌΩΊΟφΑε 1 ΧΉ
Θ® 1 Θ©ΧαΙ©ΙΛΉς’ΨÜΔ³”ΓΔΆΘ÷Ι���ΓΔΡΘ ΫΩΊ÷ΤΚΆΦ±ΆΘΑ¥βo�����Θ§Ω…¨ç§F(xi®Λn)¨Π‘O(sh®®)²δΏ\––≤ΌΉς����Θ§ΧαΙ©Ι ’œΦΑ‘O(sh®®)²δΏ\––†νëB(t®Λi)÷Η Ψüτ��Θ§ΧαΙ©Εύ²ÄΙ ’œ‘O(sh®®)÷Οϋc�Θ§Ω…ΡΘîM≤ΜΆ§«ι¦rœ¬ΒΡΙ ’œΘ§ΧαΙ©Εύ²Äκä¬Ζ–≈Χ•ΦΑöβ¬Ζ–≈Χ•ΒΡΩλΫ”≤εΩΎ����ΓΘ
Θ® 2 Θ©»ΥôCΫΜΜΞΫ”ΩΎΘ§ο@ ΨΤςûιΓί 7 ”Δ¥γ TFT ���Θ§Ζ÷±φ¬ Γί 800 ΓΝ 480 ����Θ§ΝΝΕ»Γί 350 �����Θ§¨Π±»Ε» 500:1 ���Θ§±≥Ιβνê–Ά LED ���Θ§”|ΩΊΟφΑενê–ΆûιΓί 4 ΨÄκäΉη ΫΘ§ Flash ¥φÉΠΤςΓί 120MB ���Θ§ DRAM ûιΓί 64MB ����Θ§ΧéάμΤςûιΓί 32Bit RISC CPU ®R 400MHz ����Θ§ΧαΙ© RS-232 ΚΆ RS-485 ¥°––Ϋ”ΩΎ�����ΓΘ
13. Ω²ΩΊœΒΫy(t®·ng) 1 ΧΉ
Θ® 1 Θ©≤…”ΟΗΏ–‘Ρή PLC ¨ç§F(xi®Λn)Φ·≥…ΩΊ÷Τ���ΓΘ
Θ® 2 Θ©≤ΌΉςΏ^≥ΧΩ…Ά®Ώ^îzœών^≤…Φ·”¦δ¦Θ§ΫΙΨύ 2.8mm ����Θ§ΫΙΕΈèVΫ«Θ§«εΈζΕ»Γί 720p ���Θ§Η–ΙβΟφΖeΓί 1/3 ”Δ¥γ���ΓΘ
Θ® 3 Θ©Ι©öβœΒΫy(t®·ng)ΙΠ¬ Γί 600W Θ§≈≈öβΝΩ 118L/min Γά 8 L/min ��Θ§Ήν¥σâΚΝΠ 8bar �Θ§ÉΠöβΙόΓί 24L
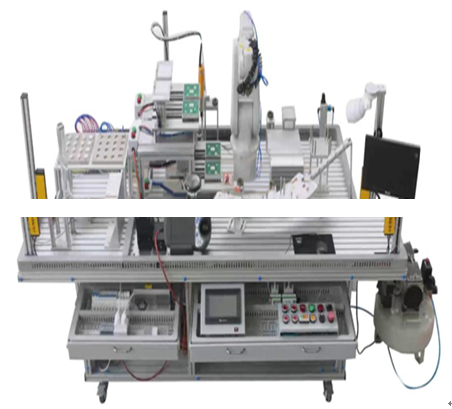
14. ΙΛΉς≈_Φή 1 ≈_
Θ® 1 Θ©δXΚœΫπΩρΦήΘ§”–ôC≤ΘΝßιT���Θ§ΧΦδ™βkΫπ²»(c®®)ΑεΦΑΒΉΑε�Θ§’ΐΟφΚΆ±≥ΟφΩ…¥ρι_¥φΖ≈‘O(sh®®)²δΦΑΈοΤΖ��ΓΘ
Θ® 2 Θ©’ϊσw≥Ώ¥γΓίΘ® 2200mm ΓΝ 1350mm ΓΝ 700mm Θ©
Θ® 3 Θ©Α≤―b≈_ΟφûιδXΚœΫπ T –Ά≤έΘ§≈_Οφ≥Ώ¥γΓίΘ® 2100mm ΓΝ 1100mm Θ©���Θ§ΚώΕ»Γί 20mm ΓΘ
Θ® 4 Θ©ΒΉ≤ΩΑ≤―b”–Ω…φiΥά»fœρΡ_ίÜΚΆΙΧΕ®÷ß™Έ����ΓΘ
15. ≈δΧΉΙΛΨΏ 1 ΧΉ
ΧαΙ©Α≤―bΓΔ’{(di®Λo)‘΅ΙΛΉς’ΨΥυ–ηΙΛΨΏ“ΜΧΉ�����Θ§Αϋά®ΘΚΙΛΨΏœδ 1 ²Ä���ΓΔÉ»(n®®i)ΝυΫ«Αβ ÷ 1 ΧΉ�ΓΔ 250mm Μν³”Αβ ÷ 1 Α―�ΓΔ 17mm/19mm ι_ΩΎΑβ ÷ 1 Α―ΓΔ 13mm ι_ΩΎΑβ ÷ 1 Α―��ΓΔ 5.5mm ι_ΩΎΑβ ÷ 1 Α―���ΓΔ¬ίΫzΒΕ 1 ΧΉ�ΓΔ 5 ΟΉΨμ≥Ώ 1 ²Ä����ΓΔ–±ΩΎψQ 1 Α―����ΓΔ Y –ΆΕΥΉ”ψQ 1 Α―���ΓΔ¬ψΕΥ–ΆΕΥΉ”ψQ 1 Α―����ΓΔ³ÉΨÄψQ 1 Α―��ΓΔΟάΙΛΒΕ 1 Α―�ΓΔ»f”Ο±μ 1 ²ÄΓΔ PLC Ψé≥ΧΨÄ 1 Ηυ��ΓΔ”|ΟΰΤΝΨé≥ΧΨÄ 1 Ηυ����ΓΔ≥Χ–ρΩΫΊê U ±P 1 ²ÄΘΜΦΑΤδΥϊ±Ί²δΙΛΨΏ�ΓΘ
16. κxΨÄΨé≥Χή¦Φΰ 5 ΧΉ‘îΦöΦΦ–g(sh®¥)ÖΔîΒ(sh®¥)“Σ«σ
ΓοΘ® 1 Θ©ΨΏ”–’ΐΑφή¦ΦΰΘ§÷–ΈΡΫγΟφ�����Θ§Ω…ΧαΙ©≥÷άm(x®¥)ΒΡ÷–ΈΡΦΦ–g(sh®¥)÷ß≥÷Ζΰ³’(w®¥)Θ§ή¦ΦΰΩ… Ι”ΟΥυ”–ΙΠΡήΡΘâK����Θ§ΫγΟφüoΓΑ‘΅”ΟΑφΓ±Ή÷‰”ΘΜ
ΓοΘ® 2 Θ©Ω…¨ç§F(xi®Λn)Εύ²ÄΤΖ≈Τ�ΓΔΕύ²Ä–ΆΧ•ΒΡΙΛ‰I(y®®)ôCΤς»ΥΏM––ΡΘ–Ά¨ß(d®Θo)»κΓΔήâέE“é(gu®©)³ù����ΓΔΏ\³”Ζ¬’φΚΆΩΊ÷Τ¥ζ¥aίî≥ω�Θ§¨ç§F(xi®Λn)κxΨÄΨé≥ΧΘ®ÖΔΩΦΤΖ≈Τ ABB ΓΔ KUKA �����ΓΔΑ≤¥®��ΓΔΑl(f®Γ)Ρ«ΩΤ��ΓΔ Staubli ���ΓΔèV÷ίîΒ(sh®¥)ΩΊ�����ΓΔ–¬ïrΏ_Β»Θ©��ΘΜ
ΓοΘ® 3 Θ©ήâέE…ζ≥…Μυ”Ύ CAD îΒ(sh®¥)™ΰ(j®¥)����Θ§ΚÜΜ·ήâέE…ζ≥…Ώ^≥ΧΘ§ΧαΗΏΨΪΕ»�����Θ§Ω…άϊ”Ο¨çσwΡΘ–Ά���ΓΔ«ζΟφΜρ«ζΨÄ÷±Ϋ”…ζ≥…Ώ\³”ήâέE�����ΘΜ
Θ® 4 Θ©÷ß≥÷ΕύίSôCΤς»ΥΒΡΏ\³”�ΓΔΖ¬’φ�����Θ§»γ 4 ίS�ΓΔ 6 ίSΓΔ 8 ίSΓΔ 10 ίSΒ»���ΘΜ
Θ® 5 Θ©÷ß≥÷ΉÉΈΜäAΨΏ‘O(sh®®)Ε®ΕύΖNΉΞ»ΓΉΥëB(t®Λi)����ΓΘ»γΩ…“‘¨Δ“Μ²ÄΉÉΈΜäAΨΏΕ®Νx≥…÷±����ΓΔèùÉ…ΖN†νëB(t®Λi)ΓΘ
Θ® 6 Θ©…ζ≥…ΒΡήâέEΩ…ΏM––Ζ÷ΫMΙήάμ����ΓΘΖ÷ΫMΚσ��Θ§Ω…¨ΠήâέEΫMΏM––ΉΔα¨��ΓΔ³h≥ΐΒ»���Θ§¨ç§F(xi®Λn)¨ΠœύΥΤήâέEΒΡΫy(t®·ng)“Μ≤ΌΉς�����ΘΜ
Θ® 7 Θ©Ω…¨ç§F(xi®Λn)¨ΔΨé≥ΧΫY(ji®Π)ΙϊΖ¬’φΏ\––≤Δίî≥ω 3D Ζ¬’φ����Θ§…œ²ς‘ΤΕΥΉ‘³”…ζ≥…ΕΰΨS¥aΦΑφ€Ϋ”Θ§Ω…”Ο ÷ôC£ΏΟηΕΰΨS¥aΚσ≤ιΩ¥‘™³”°΄��Γ�����ΘΜρèΆ(f®¥)÷Τφ€Ϋ”Κσ���Θ§Ά®Ώ^ûg”[Τς÷±Ϋ”≤ΞΖ≈����ΘΜ
Θ® 8 Θ©ΧαΙ©Ή‘Ε®ΝxΚσ÷ΟΆ®”Ο÷ΗΝνéλ��ΓΘΉ‘Ε®ΝxôCΤς»Υïr����Θ§Ω…”Ο‰I(y®®)ΫγΝς––ΒΡΆœΉßΖΫ ΫΕ®ΝxΚσ÷ΟΗώ ΫΘΜΩ…Ηυ™ΰ(j®¥)ôCΤς»ΥΤΖ≈ΤΏx™ώœύëΣ(y®©ng)ΒΡΚσ÷Ο¥ζ¥aΡΘΑε�Θ§Ε®Νx…ζ≥…¥ζ¥a≤Δ¨çïrνA(y®¥)ο@ΓΘ»γ ABB �����ΓΔ KUKA ΓΔ YASKAWA ��ΓΔèV÷ίîΒ(sh®¥)ΩΊ�ΓΔ–¬ïrΏ_ΘΜ
Θ® 9 Θ©ΑϋΚ§Ιù(ji®Π)≈ΡΫy(t®·ng)”΄Ζ÷ΈωΙΠΡή�ΓΘΩ…Ϋy(t®·ng)”΄ôCΤς»ΥΏ\––ΒΡ»Ϊ≥Χïrιg�����ΓΔΙù(ji®Π)≈Ρ��ΓΔΏ\³”ΒΡΤΫΨυΥΌΕ»�ΓΔΩ²ΨύκxΓΔΩ²ήâέEϋcîΒ(sh®¥)Β»–≈œΔ�����Θ§ΖΫ±ψ”Οëτ‘uΙάôCΤς»ΥΙΛΉς–߬ ����ΘΜ
Θ® 10 Θ©÷ß≥÷ôCΤς»Υ»ΐΨSΖ¬’φΚΆΚσ÷Ο¥ζ¥aΖ÷ΤΝΆ§≤Ϋ’{(di®Λo)‘΅Ώ\––��Θ§Ω…¨çïr±O(ji®Γn)ΩΊΖ¬’φ–ßΙϊ��ΓΘ≤ΔΩ…ο@ ΨΨé≥Χ¥ζ¥aΒΡ––Χ•Θ§îΒ(sh®¥)Ή÷�ΓΔΉΔα¨ΓΔ÷ΗΝνΒ»����ΘΜ
Θ® 11 Θ©ΨΏ²δήâέEÉû(y®≠u)Μ·ΙΠΡήΘ§Ά®Ώ^àD–ΈΜ·ΖΫ Ϋ’Ι ΨôCΤς»ΥΙΛΉςΒΡΉνÉû(y®≠u)Ö^(q®±)”ρ���Θ§≤ΔΆ®Ώ^’{(di®Λo)’ϊ«ζΨÄΉ¨ôCΤς»ΥΧé”ΎΙΛΉςΉνÉû(y®≠u)Ö^(q®±)É»(n®®i)��Θ§Ϋβ¦Q≤ΜΩ…Ώ_�����ΓΔίS≥§œόΚΆΤφ°êϋcΒΡÜ•ν}�����ΘΜ
Θ® 12 Θ©÷ß≥÷ήâέEΨéί΄ΙΠΡή��Θ§“‘àD–ΈΜ·ΖΫ ΫΆ®Ώ^Άœ³”ÖΔîΒ(sh®¥)«ζΨÄ����Θ§¹μΨéί΄“Μ½lήâέE÷–÷ΗΕ®²ÄîΒ(sh®¥)ΒΡϋc�����Θ§Ώ_ΒΫΉ¨’ϊ½lήâέEΙβΜ§Ώ^Ε…ΒΡ–ßΙϊΘΜ
Θ® 13 Θ©ΨΏ²δ“‘ïrιgίSûι’Ι ΨΖΫ Ϋ÷°“ΜΒΡΖ¬’φΙήάμΟφΑε�����ΓΘ“‘ïrιgίSΒΡΖΫ ΫΆ§ïr’Ι ΨΕύ²ÄôCΤς»ΥΚΆΏ\³”ôC‰΄(g®Αu)ΒΡΏ\³”ïr–ρ���Θ§σw§F(xi®Λn)œύΜΞΒ»¥ΐξP(gu®Γn)œΒΚΆΟΩ½lήâέEΏ\––ΒΡΤπ÷Ιïrιg���ΓΔΏ\––ΏMΕ»Β»ΘΜ
Θ® 14 Θ©‘Ύ≥Χ–ρ‘O(sh®®)”΄�ΓΔΖ¬’φΏ^≥ΧÉ…ΖNΡΘ Ϋ÷–Θ§Ω…»ΪΤΝΆΜ≥ωο@ Ψ‘O(sh®®)”΄≠h(hu®Δn)Ψ≥ΒΡάLàDÖ^(q®±)É»(n®®i)ΒΡΡΘ–Ά�ΓΘ
Θ® 15 Θ©÷ß≥÷ôCΤς»Υ‘ΎΨÄ≤ι’“Γ����ΘΩ…“‘÷±Ϋ”èΡ‘ΤΕΥôCΤς»Υéλ÷–Ώx™ώôCΤς»Υ , ¨ß(d®Θo)»κ±ΨΒΊΖ¬’φή¦ΦΰœΒΫy(t®·ng)ΏM––κxΨÄΨé≥ΧΘ§Ώx™ώΏ^≥Χ÷–÷ß≥÷Υ―Υς��ΓΔΚYΏxΚΆ≈≈–ρ��Θ§≤ΔΆΤΥ]œύΥΤÖΔîΒ(sh®¥)ΒΡôCΤς»ΥΙ©”ΟëτΏx™ώ�����ΘΜ
Θ® 16 Θ©ΨΏ²δ¨Θ‰I(y®®)ΒΡΚσ÷Ο¥ζ¥aΨéί΄Τς����ΓΘΚσ÷Ο¥ζ¥aΨéί΄ΤςΩ…“‘ο@ Ψ¥ζ¥aΒΡ––Χ•Θ§îΒ(sh®¥)Ή÷����ΓΔΉΔα¨ΚΆ÷ΗΝνΒ»ξP(gu®Γn)φIΉ÷“‘≤ΜΆ§ν¹…Ϊο@ ΨΘΜΚ·îΒ(sh®¥)‘ΎΨéί΄Ώ^≥Χ÷–”–ÖΔîΒ(sh®¥)Χα Ψ��ΘΜΚ·îΒ(sh®¥)ΚΆΉΔα¨Ω…’έ·Bκ[≤Ί�����ΓΘ
Θ® 17 Θ©ΨΏ”–ΌNàDΙΠΡή���Θ§Ω…Ά®Ώ^ΌNàD¥ζΧφΜρΚÜΜ·κxΨÄΨé≥Χή¦ΦΰΧ™îMàωΨΑ÷–èΆ(f®¥)κsΒΡΡΘ–Ά¥νΫ®���Θ§Ήν¥σœόΕ»€p–ΓΡΘ–ΆΒΡ¥σ–Γ��ΘΜΩ…‰O¥σΦ”ΩλάLàDÖ^(q®±)ΒΡΥΔ–¬é§ΥΌ¬ ��Θ§ ΙάLàDÖ^(q®±)≤ΌΉςμëëΣ(y®©ng)ΗϋΦ”λ`ΟτΓΘ
Θ® 18 Θ©ή¦ΦΰΦ·≥…Εύνê–Ά�ΓΔΕύ––‰I(y®®)‘ΎΨÄΙΛΉς’ΨΘΜΦ·≥…≤ΩΖ÷»Ϊ΅χ¬ö‰I(y®®)‘Κ–ΘΦΦΡή¥σΌêΒΡΙΛΉς’Ψ���Θ§ΖΫ±ψ‘ΎΨÄΡΘîM”•(x®¥n)ΨöΘΜ
Θ® 19 Θ©Ω…¨ç§F(xi®Λn)ή¦ΦΰÜ•ν}ΫΜΝς‘ΎΨÄΜ·���ΘΜΉςΤΖΖ÷œμ’Ι Ψ‘ΎΨÄΜ·�����ΘΜή¦Φΰ‘ΎΨÄΌY‘¥Ηϋ–¬¨çïrΜ·
Θ® 20 Θ©Ω…άϊ”Ο 3D ϋc‘ΤîΒ(sh®¥)™ΰ(j®¥)��Θ§ Ι‘O(sh®®)”΄≠h(hu®Δn)Ψ≥ΚΆ’φôC≠h(hu®Δn)Ψ≥É»(n®®i)ôCΤς»Υ�����ΓΔΙΛΨΏ���ΓΔ±ΜΦ”ΙΛΝψ≤ΩΦΰ÷°ιgΒΡΩ’ιgΈΜ÷ΟξP(gu®Γn)œΒ±Θ≥÷“Μ÷¬����Θ§¨ç§F(xi®Λn)ΗΏΨΪΕ»–Θ€ (zh®≥n)ΓΘ
Θ® 21 Θ©÷ß≥÷Ζ¬’φïrο@ Ψ±Τ’φΒΡΦ”ΙΛ–ßΙϊ�����ΓΘ
Θ® 22 Θ©œΒΫy(t®·ng)ι_Ζ≈ΒΉ¨”ΥψΖ®ΦΑ API Κ·îΒ(sh®¥)÷ß≥÷”ΟëτΕ®÷ΤΘ®Εΰ¥Έι_Αl(f®Γ)Θ© VR ¨ç”•(x®¥n)μ½ΡΩΑΗάΐ
Θ® 23 Θ©œΒΫy(t®·ng)ι_Ζ≈ΒΉ¨”ΥψΖ®≈c API Κ·îΒ(sh®¥)����Θ§Ω…îU’ΙΏBΨĨçσwôCΤς»ΥΉω¨çïrΆ§≤ΫΖ¬’φ��Θ§÷ß≥÷Χ™îM≠h(hu®Δn)Ψ≥ôCΤς»Υ≈c¨çσwôCΤς»ΥΆ§≤Ϋ³”ΉςΙΠΡή����Θ§ùMΉψ”ΟëτΕ®÷ΤΘ®Εΰ¥Έι_Αl(f®Γ)Θ©îΒ(sh®¥)Ή÷¨\…ζëΣ(y®©ng)”Ομ½ΡΩœΒΫy(t®·ng)ΓΘ
17. ‘Τ÷«Ρή¨çρû “Α≤»ΪΙήάμœΒΫy(t®·ng)
±ΨΤΫ≈_¨Δ üoΨIJςίî ��ΓΔ–≈œΔΧéάμΒ» Έο¬™(li®Δn)ΨW(w®Θng)ΦΦ–g(sh®¥) ëΣ(y®©ng)”ϔϔΎΉ‘³”Μ·Ώh≥ΧΩΊ÷Τ�ΓΘ‘O(sh®®)²δΕΥΏ\––†νëB(t®Λi)ΓΔîΒ(sh®¥)™ΰ(j®¥)ÖΔîΒ(sh®¥)Β»…œ²ς÷Ν‘ΤΤΫ≈_�����ΓΘ Έο¬™(li®Δn)ΨW(w®Θng) œΒΫy(t®·ng)ΒΡ²ςΗ–¨”�ΓΔ²ςίî¨”ΚΆëΣ(y®©ng)”Ο¨”ξP(gu®Γn)¬™(li®Δn)’ΤΈ’îΒ(sh®¥)™ΰ(j®¥)≈cΖ÷ΈωîΒ(sh®¥)™ΰ(j®¥)ΓΘ
• κäâΚ�ΓΔκäΝςΒ»ΡΘîMΝΩîΒ(sh®¥)™ΰ(j®¥)ο@ ΨΓΘ
• ίî»κι_ξP(gu®Γn)±O(ji®Γn)ΩΊΘ§ίî≥ωι_ξP(gu®Γn)Β»îΒ(sh®¥)Ή÷ΝΩΩΊ÷Τ�ΓΘ
• Ώh≥ΧΩΊ÷ΤÜΔΆΘ†νëB(t®Λi)Θ§ΫoΕ®ίî≥ωκäâΚ÷ΒΒΡ�����ΓΘ
• ο@ Ψίî»κίî≥ωκäâΚ÷ΒΒΡöv ΖîΒ(sh®¥)™ΰ(j®¥)
• Ω…Α¥’’»’ΤΎ��ΓΔ»’ιgΏM––≤ι‘Éöv ΖîΒ(sh®¥)ΏM––≤ι‘É���ΓΘ
• àσΨ·–≈Χ•ûι PLC ÷ςôCΡΘîMΝΩ≤…Φ·îΒ(sh®¥)÷ΒΜρ’Ώι_ξP(gu®Γn)ΝΩΩ…“‘Ή‘”…‘O(sh®®)Ε®�����Θ§»γ°î(d®Γng)ΡΘîMΝΩίî»κ≥§Ώ^‘O(sh®®)Ε®κäâΚïr°a(ch®Θn)…ζàσΨ·�Θ§Ά®Ώ^Έο¬™(li®Δn)ΨW(w®Θng)Ή‘³”Μ·ëΣ(y®©ng)”Οή¦Φΰ¨ΔàσΨ·–≈Χ•…œ²ςΒΫ‘ΤΤΫ≈_�����Θ§Ά®Ώ^‘ΤΤΫ≈_œρ‘O(sh®®)÷ΟΒΡΫKΕΥΆΤΥΆàσΨ·–≈Χ•�����Θ§ΟΩ≈_‘O(sh®®)²δΩ…¨ΠëΣ(y®©ng)Εύ²ÄΫKΕΥ‘O(sh®®)²δ�ΓΘ
• Ά®Ώ^ ÷ôCΕΥΩ…“‘¨ç§F(xi®Λn)Ώh≥ΧΩΊ÷Τ PLC ΒΡίî≥ωΦΑ±O(ji®Γn)“ï PLC ΒΡίî»κ†νëB(t®Λi)ΉÉΜ·ΓΘ
• îΒ(sh®¥)™ΰ(j®¥)ο@ Ψ°΄ΟφΘΚ°΄Οφο@ Ψίî»κκäâΚîΒ(sh®¥)÷ΒΘ§ίî≥ωκäâΚ±O(ji®Γn)ΩΊ����Θ§ι_ξP(gu®Γn)†νëB(t®Λi)ίî»κΘ§ι_ξP(gu®Γn)ΩΊ÷Τίî≥ω�����Θ§“‘ΦΑ‘ΤΕΥΏBΫ”ΕΰΨS¥a��ΓΘ
• ¬™(li®Δn)ΨW(w®Θng)‘O(sh®®)÷ΟΫγΟφΘΚ‘O(sh®®)÷Ο§F(xi®Λn)àωîΒ(sh®¥)™ΰ(j®¥)ΏBΫ”‘ΤΤΫ≈_Κσ≈_îΒ(sh®¥)™ΰ(j®¥)éλΙήάμ�ΓΘ
Γο –ηΧαΙ©‘Τ÷«Ρή¨çρû “Α≤»ΪΙήάμœΒΫy(t®·ng)ή¦Φΰ÷χΉςôύ(qu®Δn)ΉCïχ‘≠Φΰ²δ≤ι�����Θ§≤Δ§F(xi®Λn)àω―ί Ψ 1-3 μ½ΙΠΡή“ïνl �����ΓΘ
18. ¨çρû “÷«Ρήκä‘¥ΙήάμœΒΫy(t®·ng)
¨ç”•(x®¥n) “Ω²σw÷«Ρήκä‘¥ΙήάμœΒΫy(t®·ng)”…÷ςκä¬Ζ��ΓΔΩΊ÷Τκä¬Ζ��ΓΔôz€y±ΘΉoκä¬Ζ�ΓΔο@ Ψκä¬ΖΓΔ’Z“τàσΨ·κä¬ΖΒ»ΫM≥…Θ§’ϊ²Ä¨çρû “≈δ÷Ο“ΜΧΉΙήάμœΒΫy(t®·ng)��ΓΘ
÷ς“ΣΙΠΡήΘΚ
18.1 …œκäœΒΫy(t®·ng)Ή‘€y
Θ® 1 Θ©÷ςκä¬ΖΦΑΩΊ÷Τκä¬Ζ…œκäΚσ¨ΠΨÄ¬ΖœΒΫy(t®·ng)ΏM––ίî»κκäâΚΒΡΏ^âΚ�ΓΔ«ΖâΚΘΜΨÄ¬Ζ¨ΠΒΊ¬©κä�����ΘΜίî≥ωΊ™ίdΏ^ΝςΒΡôz€y�Θ§»Έ“ΜΙ ’œ¥φ‘Ύκä‘¥ίî≥ωîύι_ΓΘ
Θ® 2 Θ©Ι ’œÉ»(n®®i)»ί”–œύëΣ(y®©ng)ΈΡΉ÷ο@ Ψ���ΓΘ
Θ® 3 Θ©¨ΠΙ ’œΏM––’Z“τàσΨ·��ΓΘ
18.2 Ώ\––ôz€y±ΘΉo
Θ® 1 Θ©ίî»κΏ^âΚ��ΓΔ«ΖâΚ���ΓΔίî≥ωΏ^ΝςΓΔ¬©κä���Θ§»Έ“ΜΙ ’œ≥ω§F(xi®Λn)¨ΔΉ‘³”Χχιl����Θ§¨ç ©±ΘΉoΓΘ
Θ® 2 Θ©¨ΠΙ ’œΏM––’Z“τàσΨ·�ΓΘ
Θ® 3 Θ©±ΘΉoιy÷ΒΩ…ΏM––§F(xi®Λn)àω‘O(sh®®)÷ΟΓΘ
18.3 ¬©κäΙΠΡή€y‘΅
Θ® 1 Θ©Α¥œ¬¬©κä€y‘΅Α¥βo����Θ§―b÷ΟïΰΉ‘³”ΧαΙ©“Μ²Ä¬©κä€y‘΅–≈Χ•Θ§ Ι±ΘΉoΤςΧχιl�ΓΘ
Θ® 2 Θ©÷Ί–¬ΏM––…œκäΏM»κΉ‘ΦΚôz€y†νëB(t®Λi)Θ§ΈΡΉ÷ο@ ΨΓΑι_ôCôz€y÷– .... Γ±����Θ§üoΙ ’œ«ι¦rœ¬����Θ§¨ç”•(x®¥n) “÷«Ρήκä‘¥ΙήάμœΒΫy(t®·ng)Μ÷èΆ(f®¥)Ι©κäΓΘ
18.4 Ώ^âΚ±ΘΉo
Θ® 1 Θ©Ώ\––÷–�Θ§≥ω§F(xi®Λn)ίî»κΏ^âΚΘ§¨ç”•(x®¥n) “÷«Ρήκä‘¥ΙήάμœΒΫy(t®·ng)¨ΔΧχιl�ΓΘ
Θ® 2 Θ©¨ΠëΣ(y®©ng)ΒΡΓΑΏ^âΚœύΓ±ΏM––ΈΡΉ÷ο@ ΨΓΘ
Θ® 3 Θ©’Z“τ≤ΞàσΓΑΨÄ¬ΖΏ^âΚ����Θ§’àΉΔ“βΓ±ΓΘ
18.5 Ώ^Νς±ΘΉo
Θ® 1 Θ©Ώ\––÷–����Θ§»ΐœύκä‘¥÷–»Έ“Μœύ≥ω§F(xi®Λn)Ώ^Νς��Θ§¨ç”•(x®¥n) “÷«Ρήκä‘¥ΙήάμœΒΫy(t®·ng)¨ΔΧχιl�����ΓΘ
Θ® 2 Θ©¨ΠëΣ(y®©ng)ΒΡΓΑΏ^ΝςœύΓ±ΏM––ΈΡΉ÷Χα Ψ�����ΓΘ
Θ® 3 Θ©’Z“τ≤ΞàσΓΑΨÄ¬ΖΏ^Νς���Θ§’àΉΔ“βΓ±
18.6 ¬©κä±ΘΉo
Θ® 1 Θ©Ώ\––÷–Θ§»ΐœύ÷–»Έ“Μœύ≥ω§F(xi®Λn)¬©κä�Θ§¨ç”•(x®¥n) “÷«Ρήκä‘¥ΙήάμœΒΫy(t®·ng)¨ΔΧχιlΓΘ
Θ® 2 Θ©¨ΠΓΑ¬©κäΓ±ΏM––ΈΡΉ÷ο@ Ψ����ΓΘ
Θ® 3 Θ©’Z“τ≤ΞàσΓΑΨÄ¬Ζ¬©κäΘ§’àΉΔ“βΓ±�����ΓΘ
18.7 κä‘¥±O(ji®Γn)ΩΊ
Θ® 1 Θ©Ω…¨ΠΗςœύκäâΚΏM––îΒ(sh®¥)÷Βο@ ΨΦΑ«ζΨÄο@ Ψ�����Θ§ο@ ΨΨΪΕ»Γά 5V
Θ® 2 Θ©Ω…¨ΠΗςœύκäΝςΏM––îΒ(sh®¥)÷Βο@ ΨΦΑ«ζΨÄο@ ΨΘ§ο@ ΨΨΪΕ»Γά 0.1A
Θ® 3 Θ©ΗΏâΚ±ΘΉoκäâΚ‘O(sh®®)÷ΟΘΚ
ΔΌ‘O(sh®®)÷ΟΖΕ΅ζ <300V �����Θ§ίî»κ 1A;
ΔΎ³”ΉςïrιgΘΚ 2-5S ���Θ§ίî»κÜΈΈΜ 0.1S
Θ® 4 Θ©«ΖâΚ±ΘΉoκäâΚ‘O(sh®®)÷ΟΘΚ
ΔΌ‘O(sh®®)÷ΟΖΕ΅ζΘΚ >154V ��Θ§ίî»κÜΈΈΜ 1V
ΔΎ³”ΉςïrιgΘΚ 2-5S �����Θ§ίî»κÜΈΈΜ 0.1S
(5) Ώ^Νς±ΘΉoκäΝς‘O(sh®®)÷ΟΘΚ
ΔΌ‘O(sh®®)÷ΟΖΕ΅ζΘΚ <20A, ίî»κÜΈΈΜ 0.01A;
ΔΎ³”ΉςïrιgΘΚ 0.5-2S Θ§ίî»κÜΈΈΜ 0.1S
19. ΙΛ‰I(y®®)ôCΤς»Υ’n≥ΧΌY‘¥
• ΙΛ‰I(y®®)ôCΤς»ΥΒΡΗ≈ ωΘΚΙΛ‰I(y®®)ôCΤς»ΥΒΡΕ®Νx�ΓΔΑl(f®Γ)’Ι≈cëΣ(y®©ng)”ΟΓΔΜυ±ΨΫM≥…ΦΑΦΦ–g(sh®¥)ÖΔîΒ(sh®¥)��ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡΖ÷νê����ΘΜ
• ΙΛ‰I(y®®)ôCΤς»ΥΒΡôC–ΒœΒΫy(t®·ng)ΘΚΙΛ‰I(y®®)ôCΤς»ΥΒΡ 1 ίSΫY(ji®Π)‰΄(g®Αu)ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ 2 ίSΫY(ji®Π)‰΄(g®Αu)�����ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ 3 ίSΫY(ji®Π)‰΄(g®Αu)ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ 4 ίSΫY(ji®Π)‰΄(g®Αu)����ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ 5 ίSΫY(ji®Π)‰΄(g®Αu)ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ 6 ίSΫY(ji®Π)‰΄(g®Αu)��ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡôC…μΫY(ji®Π)‰΄(g®Αu)���ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ––ΉΏΫY(ji®Π)‰΄(g®Αu)��ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡρ¨(q®±)³”―b÷ΟΚΆ²ς³”ÜΈ‘Σ��ΘΜ
• ΙΛ‰I(y®®)ôCΤς»ΥΒΡΏ\³”¨W(xu®Π)≈c³”ΝΠ¨W(xu®Π)ΘΚΙΛ‰I(y®®)ôCΤς»ΥΒΡΏB½UÖΔîΒ(sh®¥)ΚΆΐR¥ΈΉχ‰Υ(bi®Γo)ΉÉ™QΨΊξ΅�ΓΘ
• ΙΛ‰I(y®®)ôCΤς»ΥΒΡΩΊ÷ΤœΒΫy(t®·ng)ΘΚΙΛ‰I(y®®)ôCΤς»ΥΩΊ÷Τ―b÷Ο�ΓΔΙΛ‰I(y®®)ôCΤς»Υρ¨(q®±)³”―b÷ΟΓΔΙΛ‰I(y®®)ôCΤς»Υôz€y―b÷Ο���ΘΜ
• ΙΛ‰I(y®®)ôCΤς»ΥΒΡΨé≥ΧΘΚΙΛ‰I(y®®)ôCΤς»ΥΒΡΨé≥ΧΖΫ Ϋ����ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ ΨΫΧΨé≥Χ�ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡΨé≥Χ’Z―‘�����ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡ’Z―‘œΒΫy(t®·ng)ΫY(ji®Π)‰΄(g®Αu)ΚΆΜυ±ΨΙΠΡή�ΓΔ≥Θ”ΟΙΛ‰I(y®®)ôCΤς»ΥΨé≥Χ’Z―‘���ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡκxΨÄΨé≥Χ����ΓΔΙΛ‰I(y®®)ôCΤς»ΥΒΡκxΨÄΨé≥ΧΖ¬’φή¦ΦΰΦΑΨé≥Χ Ψάΐ��ΘΜ
• ΙΛ‰I(y®®)ôCΤς»ΥΒΡΒδ–ΆëΣ(y®©ng)”ΟΘΚΚΗΫ”ôCΤς»ΥΒΡëΣ(y®©ng)”Ο�ΓΔΑαΏ\ôCΤς»ΥΒΡëΣ(y®©ng)”ΟΓΔ¥aΕβôCΤς»ΥΒΡëΣ(y®©ng)”Ο���ΓΔΆΩ―bôCΤς»ΥΒΡëΣ(y®©ng)”ΟΓΔ―b≈δôCΤς»ΥΒΡëΣ(y®©ng)”Ο�ΘΜ
• ΧαΙ©Τϊή΅…ζ°a(ch®Θn)ΨÄΙΛ‰I(y®®)ôCΤς»ΥëΣ(y®©ng)”ΟΒΡΗΏ«ε“ïνlΓΘ
20.PLC Ψé≥ΧΫΧ¨W(xu®Π)’nΦΰΌY‘¥
Θ® 1 Θ© S7-1200PLC ΒΡ’J÷ΣΘΚ S7-1200PLC ΚÜΫι�ΓΔ S7-1200PLC ΙΛΉς‘≠άμΦΑΏ\––ΡΘ ΫΓΔ S7-1200PLC ΧΊϋc���ΓΔ S7-1200PLC îU’ΙΙΠΡή�ΓΔ PLC ëΣ(y®©ng)”ΟΦΦ–g(sh®¥)»Υ≤≈≈ύπB(y®Θng)ΘΜ
Θ® 2 Θ© TIA ≤©àDή¦ΦΰΒΡ Ι”ΟΘΚ TIA ≤©àDΦ·≥…ή¦Φΰι_Αl(f®Γ)ΤΫ≈_�����ΓΔ TIA ≤©àDΦ·≥…ή¦ΦΰΚÜΫι�����ΓΔ»κιT¨çάΐ�ΘΜ
Θ® 3 Θ©ΩΊ÷ΤÜΈ‘ΣΒΡ≥Χ–ρ‘O(sh®®)”΄ΓΔ÷ΗΝνΨé¨ë���ΓΔ”≤ΦΰΏx–ΆΚΆ‘O(sh®®)”΄��ΓΔ’nΚσΥΦΩΦ≈cΨöΝï(x®Σ)Β»É»(n®®i)»ί����ΓΘΡΘâK÷Ν…ΌΑϋά®ΘΚΑΥ¬Ζ™¨¥πΤς���ΓΔ»ΐœύ°ê≤ΫκäôCΒΡ–«»ΐΫ«ΫΒâΚÜΔ³”���ΓΔΏ\Νœ–Γή΅ΆυΖΒΩΊ÷ΤΓΔ °Ή÷¬ΖΩΎΫΜΆ®üτΒΡΩΊ÷ΤΓΔκä³”ôCΫMΒΡÜΔΆ��ΘΩΊ÷Τ��ΓΔ HMI ΩΊ÷Τ“ΚσwΜλΚœ���ΓΔ G120 ΉÉνlΤςΒΡκäôCΩΊ÷Τ�ΓΘ
Θ® 4 Θ©–Γ–ΆΉ‘³”Μ·…ζ°a(ch®Θn)ΨÄΒΡ‘O(sh®®)”΄
’nΦΰΌY‘¥ΨΏ”–°a(ch®Θn)ΤΖΒΡΑαΏ\����ΓΔôz€yΚΆ²ςίîΖ÷£ΰΙΠΡήΘ§’ϊ²ÄœΒΫy(t®·ng)”…ΥΆΝœÜΈ‘Σ���ΓΔôC–Β ÷ΑαΏ\ÜΈ‘Σ���ΓΔ≤ΫΏMκäôCΕύϋcΕ®ΈΜίîΥΆÜΈ‘ΣΚΆ²ςΥΆéßίîΥΆΖ÷£ΰÜΈ‘ΣΒ»ΫM≥…ΓΘΨΏσwΒΡμ½ΡΩ‘O(sh®®)”΄“Σ«σ»γœ¬ΘΚ
1 Θ©±Ψ‘O(sh®®)”΄ΒΡ“Σ«σ Ι”ΟΆ®Ώ^”|ΟΰΤΝ≈cΩΊ÷Τ≈_Α¥βo≤ΌΉς���Θ§ΩΊ÷Τ…ζ°a(ch®Θn)ΨÄΒΡΉ‘³”Ώ\––����ΓΘ…ζ°a(ch®Θn)ΨÄΆ®κä“‘Κσ���Θ§œΒΫy(t®·ng)Ή‘––ôz€y≥θ Φ†νëB(t®Λi) «ΖώùMΉψΏ\––½lΦΰ�Θ§»γ≤ΜùMΉψ³tΉ‘––èΆ(f®¥)ΈΜΜρ ÷³”’{(di®Λo)’ϊ����Θ§»τùMΉψ³t”|ΟΰΤΝο@ Ψ€ (zh®≥n)²δΨΆΨwΘΜ
2 Θ©‘Ύ€ (zh®≥n)²δΨΆΨwΒΡ«ι¦rœ¬�Θ§Α¥œ¬ÜΔ³”Α¥βoΘ§…ζ°a(ch®Θn)ΨÄι_ ΦΑ¥μ‰–ρΏ\––���Θ§Ι©ΝœÜΈ‘Σι_ ΦΙΛΉς�Θ§κäôCρ¨(q®±)³”όD(zhu®Θn)±P¨ΔΙΛΦΰΥΆΒΫΈοΝœ≈_…œ���ΘΜκäôCΏ\–– 10 ΟκΚσ����Θ§»τΈοΝœ≈_Ιβκäι_ξP(gu®Γn)¦]”–ôz€yΒΫΈοΝœ�����Θ§’fΟς“―¦]”–ΈοΝœ��Θ§ι_ ΦàσΨ·����ΘΜ»τôz€yΒΫΈοΝœ�Θ§³t“ΜΧ•ΑαΏ\ôC–Β ÷ι_ Φ³”Ής����ΘΜ
3 Θ©ΈοΝœ≈_”–ΝœΘ§“ΜΧ•ôC–Β ÷±έ…λ≥ω≤Δœ¬ΫΒäA»ΓΙΛΦΰ���Θ§äA»ΓΒΫΙΛΦΰΚσôC–Β ÷…œ…ΐΩsΜΊ≤Δ–ΐόD(zhu®Θn)ΒΫ”“²»(c®®)œόΈΜ�����ΘΜ»ΜΚσôC–Β ÷…λ≥ωœ¬ΫΒ¨ΔΙΛΦΰΖ≈ΒΫ≤ΫΏMκäôCίîΥΆÜΈ‘ΣΒΡΙ©Νœ≈_…œ���Θ§“ΜΧ•ΑαΏ\ôC–Β ÷Μ÷èΆ(f®¥)ΒΫ≥θ Φ†νëB(t®Λi)Θ§Β»¥ΐœ¬“Μ¥ΈΏ\––�����ΘΜ
4 Θ©°î(d®Γng)≤ΫΏMκäôCίîΥΆÜΈ‘Σ²ςΗ–Τςôz€yΒΫΙ©Νœ≈_ΙΛΦΰΚσ���Θ§≤ΫΏMκäôC«ΑΆυΗΏΕ»ôz€yÜΈ‘ΣΏM––ôz€y��ΘΜΒΫΏ_ΚσΆ®Ώ^≥§¬ï≤®²ςΗ–ΤςΏM––ΗΏΕ»ôz€y���Θ§ôz€yΆξ°ÖΚσΘΜ≤ΫΏMκäôCΏ\––ΒΫΕΰΧ•ΑαΏ\ôC–Β ÷ΈΜ÷Ο����ΘΜ
5 Θ©ΒΫΏ_ΕΰΧ•ΑαΏ\ôC–Β ÷ΈΜ÷ΟΚσΘΜΕΰΧ•ΑαΏ\ôC–Β ÷…λ≥ω��ΓΔΉΠäA»ΓΙΛΦΰ�Θ§ôCΦή≈_…œ…ΐΘ§–ΐόD(zhu®Θn)ΒΫ”“œόΈΜ����Θ§…λ≥ω ÷±έΘ§ôCΦή≈_œ¬ΫΒ�Θ§ ÷ΉΠΖ≈Υ…Θ§¨ΔΙΛΦΰΖ≈ΒΫ²ςΥΆéß…œ��Θ§Ά§ïrΕΰΧ•ΑαΏ\ôC–Β ÷èΆ(f®¥)ΈΜ��ΘΜ
6 Θ©°î(d®Γng)²ςΥΆéßÜΈ‘Σ²ςΗ–Τςôz€yΒΫΙΛΦΰïr���Θ§²ςΥΆéßι_ ΦΙΛΉς�Θ§Ηυ™ΰ(j®¥)ΙΛΦΰΒΡν¹…Ϊ�����ΓΔ≤ΡΝœΏM––Ζ÷£ΰΘΜΖ÷£ΰΫY(ji®Π) χΚσ��Θ§Ι©Νœ≈_ΜΊΒΫΙ©ΝœΈΜ÷Ο�Θ§Β»¥ΐœ¬“Μ¥ΈΏ\––ΓΘ
Θ® 5 Θ©”Οëτ ÷É‘ΘΚΑϋά®≈c S7-1200 ���ΓΔ”–ξP(gu®Γn)”≤Φΰ��ΓΔή¦ΦΰΚΆΆ®–≈ΒΡ ÷É‘����Θ§îΒ(sh®¥)ΝΩ≤Μ…Ό”ΎΕΰ °ΕύΖN����ΓΘ
’nΦΰΌY‘¥ΧαΙ©‘îΦöΒΡ≈δΦΰ¨çΈοàDΤ§ΦΑÖΔîΒ(sh®¥)ΙΠΡήΫιΫBΓΔ”≤ΦΰΫM≥…àDΫβ�ΓΔ≥Χ–ρ÷ΗΝνΓΔ≥Χ–ρ‘O(sh®®)”΄���ΓΔöβ³”‘≠άμàD����ΓΔκäöβ‘≠άμàDΓΔ”≤ΦΰΫMëB(t®Λi)Β»��Θ§àDΈΡ≤ΔΟ·��ΓΘ
|