JGY-PCB01 ą═ ╣żśI(y©©)ÖCŲ„╚╦ PCB «Éą╬▓Õ╝■╣żū„šŠ
ę╗�����Īó╣żśI(y©©)ÖCŲ„╚╦ PCB «Éą╬▓Õ╝■╣żū„šŠįö╝Ü╝╝ągģóöĄ
1. ╣żśI(y©©)ÖCŲ„╚╦▒Š¾wŻ║
ABB IBR120/3 ┴∙ūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦▒Š¾w�����Ż╗ūŅ┤¾žō▌dĪ▌ 3 kg Ż╗ ūŅ┤¾▒█š╣░ļÅĮĪ▌ 580mm �����Ż╗ ▌SöĄŻ║Ī▌ 6 ▌S�Ż╗╬╗ų├ųžÅ═Š½Č╚Ż║©Q 0.01mm Ż╗ Ę└ūoĄ╚╝ēŻ║ Ī▌ IP30 �Ż╗
▌S▀\äėĘČć·Ż║
Ż© 1 Ż® 1 ▌SŻ║Ī▌Ī└ 165 ĪŃ
Ż© 2 Ż® 2 ▌SŻ║Ī▌Ī└ 110 ĪŃ
Ż© 3 Ż® 3 ▌SŻ║Ī▌ +70 ĪŃų┴ -110 ĪŃ
Ż© 4 Ż® 4 ▌SŻ║Ī▌Ī└ 160 ĪŃ
Ż© 5 Ż® 5 ▌SŻ║Ī▌Ī└ 120 ĪŃ
Ż© 6 Ż® 6 ▌SŻ║Ī▌Ī└ 400 ĪŃ
ÖCŲ„╚╦▒Š¾wųž┴┐Ż║Ī▄ 25kg Ż╗ ūŅ┤¾įļ궯║Ī▄ 70dB(A) ���ĪŻ
2. ╣żśI(y©©)ÖCŲ„╚╦┐žųŲŲ„Ż║
• Šo£Éą═╣żśI(y©©)ÖCŲ„╚╦┐žųŲ╣±�Ż¼┼c┼õ╠ūĄ─╣żśI(y©©)ÖCŲ„╚╦▒Š¾w┼õ╠ū����Ż╗
• ┐žųŲė▓╝■Ż║ČÓ╠Ä└ĒŲ„ŽĄĮy(t©»ng)┤¾╚▌┴┐ķW┤µĪó UPS éõĘ▌ļŖį┤Ż©Ī▌ 20S Ż®����Ż╗
• ┐žųŲ▄ø╝■Ż║▄ø╝■│÷ÅSŅAčbŻ╗
• Ņ~Č©╣”┬╩Ż║Ī▌ 3KVA( ūāē║Ų„╚▌┴┐ ) �Ż╗
• ļŖį┤▌ö╚ļŻ║ 200V/230V 50-60Hz
• │▀┤ńŻ║ 710*449*442mm
• ųž┴┐Ż║ 30kg
• Ę└ūoĄ╚╝ēŻ║ IP20
3.FlexPendant ╩ŠĮ╠Ų„
• ųž┴┐Ż║ 1kg
• ų¦│ųŻ║▓╩╔½ė|├■Ų┴Īó▓┘┐vŚU���Ż¼Šo╝▒═Ż����Īóų¦│ųæTė├ū¾ / ėę╩ųŪąōQŻ¼ų¦│ų U ▒P��Īó¤ß▓Õ░╬���Īó╗ųÅ═│╠ą“�Ż¼ų¦│ų USB ā”┤µŲ„��Ż¼Ä¦Ģrķgś╦ėøĄŪõø��Ż¼ų¦│ų▀h│╠Ę■äš�ĪŻ
4. ┐ņōQ╣żŠ▀ 1 ╠ū
Ż© 1 Ż®╣żŠ▀┐ņōQŽĄĮy(t©»ng)Ż║┐╔īŹ¼F(xi©żn)▓╗═¼╣żŠ▀ķg¤oąĶ╚╦×ķĖ╔╔µūįäė═Ļ│╔ŪąōQ��Ż¼Ī▌ 6 ┬ĘÜŌäėą┼╠¢����Ż¼Ņ~Č©žō▌dĪ▌ 3kg Ż¼║±Č╚ 38mm Ī└ 5mm ��Ż¼ųž┴┐ 125g Ī└ 20g ���ĪŻ
Ż© 2 Ż®─zśī╣żŠ▀Ż║║¼ėą╣żŠ▀Č╦┐ņōQ─ŻēK┼c┐ņōQ─ŻēK┼õ╠ū��Ż¼┐éķL 140mm-150mm ����Ż¼═ŌÜż×ķõX║ŽĮ▓─┘|ĪŻ
Ż© 3 Ż®ŖAū”╣żŠ▀Ż║┐éķL 140mm Ī└ 2mm �����Ż¼ā╚ÅĮ 20mm Ī└ 2mm ��Ż¼ųžÅ═Š½Č╚Ė▀ė┌Ī└ 0.01mm ��Ż¼ķ]║ŽŖA│ų┴”Ī▌ 45N �Ż¼ķ_ķ]ąą│╠ 10mm Ī└ 2mm ĪŻ
Ż© 4 Ż®╬³▒P╣żŠ▀Ż║┐éķL 110mm Ī└ 2mm ���Ż¼ĮYśŗ×ķõX║ŽĮ▓─┘|����Ż¼ōĒėąų▒ÅĮ 4mm Ī└ 1mm ╬³▒P 1 éĆ╗“ 1 éĆęį╔Ž����Ż¼ų▒ÅĮ 20mm Ī└ 2mm ╬³▒P 2 éĆ╗“ 2 éĆęį╔ŽĪŻ
Ż© 5 Ż®µi┬▌Įz╣żŠ▀Ż║ĮYśŗ×ķõX║ŽĮ▓─┘|��Ż¼┐éķL 360mm Ī└ 2mm Ż¼┼ż┴” 0.19Nm~0.78Nm �Ż¼▐D╦┘ 2200r/min-2500 r/min ų«ķgĪŻ
5. ═┐─zå╬į¬ 1 ╠ū
1) 3D ▄ē█EłD░Õ│▀┤ń 440mm Ī┴ 250mm Ż©Ī└ 2mm Ż®�Ż¼Š▀ėą░ļĮø 50mm Ī└ 2mm Ą─╣░ą╬├µŻ¼▓─┘|×ķ╠╝õō┐ŠŲß╗“õX║ŽĮ�����Ż¼║±Č╚ 3mm Ī└ 0.5mm �ĪŻ
6. ┤aČŌå╬į¬ 1 ╠ū
Ż© 1 Ż®┼_├µ×ķ POM ╗“õX║ŽĮŻ¼│▀┤ń 110mm Ī┴ 110mm Ī┴ 15mm ķLīÆĪ└ 20mm ���Ż¼Ė▀Ī└ 5mm ���Ż¼▓╔ė├õX║ŽĮą═▓─ų¦ō╬����Ż¼Ė▀Č╚ 160mm Ī└ 20mm ĪŻ
Ż© 2 Ż®░³║¼─ŻöM╬’┴Ž��Ż¼▓─┘| PVC ╗“õX║ŽĮ���Ż¼│▀┤ń 65mm Ī┴ 32mm Ī┴ 15mm Ż©Ī└ 5mm Ż®��Ż¼öĄ┴┐Ī▌ 8 éĆ���ĪŻ
7. ęĢėXÖz£yå╬į¬ 1 ╠ū
Ż© 1 Ż®ęĢėXÖz£y▓╔ė├ CCD ┼─ššÖz£y�����Ż¼ėąą¦Ž±╦žöĄĪ▌ 1600 Ī┴ 1200 ��Ż¼▓╩╔½Öz£y�Ż¼özŽ±├µĘeĪ▌ 7.0mm Ī┴ 5.4mm ���Ż¼ł÷Š░öĄĪ▌ 120 éĆ�����Ż¼┐╔┤µā”łDŽ±öĄĪ▌ 40 Åł��Ż¼┐╔└¹ė├┴„│╠ŠÄ▌ŗ╣”─▄ųŲū„╠Ä└Ē┴„│╠�����Ż¼ų¦│ų┤«ąą RS-232C ║═ŠWĮj Ethernet ═©ėŹ���Ż¼╠ß╣®Ė▀╦┘▌ö╚ļĪ▌ 1 ³c����ĪóĖ▀╦┘▌ö│÷Ī▌ 4 ³c�����Īó═©ė├▌ö╚ļĪ▌ 9 ³c║══©ė├▌ö│÷Ī▌ 23 ³cĄ─▓óąą═©ą┼�Ż¼╠ß╣® DVI-I ▒O(ji©Īn)┐ž▌ö│÷ĪŻ
Ż© 2 Ż®╠ß╣®Łh(hu©ón)ą╬╣Ōį┤�����Ż¼ā╚łAų▒ÅĮ 90mm Ī└ 5mm ���Ż¼═ŌłAų▒ÅĮ 120mm Ī└ 5mm ���Ż¼╣®ļŖļŖē║×ķų▒┴„ 12V ╗“ 24V ĪŻ
Ż© 3 Ż®ęĢėXÖz£yĮY╣¹║═▓╔╝»łDŽ±ą┼Žó═©▀^Ī▌ 12 ėó┤ń’@╩ŠŲ„╝┤Ģr’@╩Š�Ż¼ĘĮ▒ŃęĢėXÖz£yģóöĄš{š¹║═ĀŅæB(t©żi)▒O(ji©Īn)┐ž�����ĪŻ
8. čb┼õÖz£yå╬į¬ 1 ╠ū
Ż© 1 Ż®░▓čbÖz£y╣ż╬╗š¹¾w│▀┤ń×ķ 410mm Ī┴ 190mm Ī┴ 180mm Ż©Ī└ 20mm Ż®���Ż¼ĮYśŗ×ķõX║ŽĮ▓─┘|�ĪŻ
Ż© 2 Ż®░▓čbŲĮ┼_░▓čbį┌ļp┴ąŠĆąį╗¼▄ē╔ŽŻ¼īÆČ╚ 9mm Ī└ 1mm ���Ż¼ķLČ╚Ī▌ 300mm ����Ż¼▓╔ė├ÜŌäė“īäė����Ż¼ā╚ÅĮ 16 Ī└ 1mm Ż¼ėąą¦ąą│╠Ī▌ 200mm �����Ż¼░▓╚½▒Ż│ų┴”Ī▌ 140N �����ĪŻ
Ż© 3 Ż®Öz£yų¦╝▄╔²ĮĄ▓╔ė├ÜŌäė“īäė����Ż¼ā╚ÅĮ 16mm Ī└ 1mm Ż¼ėąą¦ąą│╠Ī▌ 20mm Ż¼░▓čbėą LED ī¦╣Ō░Õ��Ż¼│▀┤ń×ķ 100 Ī└ 10mm Ī┴ 100 Ī└ 10mm Ī┴ 1.5 Ī└ 0.5mm ��Ż¼┐╔į┌Öz£y▀^│╠ųą┴┴Ų�ĪŻ
9. ┬▌Įz╣®┴Žå╬į¬ 1 ╠ū
═Ōą╬│▀┤ń 360 Ī└ 20mm Ī┴ 250 Ī└ 10mm Ī┴ 160 Ī└ 10mm Ż¼▌ö╦═╦┘Č╚ 0.3s-0.8s/ Ņw��Ż¼▀mė├┬▌ĮzęÄ(gu©®)Ė± M2~M5 �Ż¼ūŅ┤¾┬▌ĮzķLČ╚ 20mm
10. įŁ┴Ž┴ŽÄņ 1 ╠ū
å╬īė╣▓ 4 éĆ┴Žģ^(q©▒)Ż¼┐╔Ęųäeė├ė┌┤µĘ┼«Éą╬ąŠŲ¼┴Ń╝■�Īó╔w░Õ║═ PCB ļŖ┬Ę░ÕŻ¼ā╚łA░ļÅĮĪ▌ 500mm ��ĪŻ
11. ļŖūė«aŲĘ PCB ļŖ┬Ę░Õ 5 ╠ū
Ż© 1 Ż® PCB ļŖ┬Ę░Õ���Ż¼│▀┤ń 120mm Ī┴ 120mm ���Ż¼║± 12mm ĪŻ
Ż© 2 Ż®╔w░Õ�����Ż¼│▀┤ń 120mm Ī┴ 120mm �Ż¼║± 5mm ĪŻ
12. ▓┘┐ž├µ░Õ 1 ╠ū
Ż© 1 Ż®╠ß╣®╣żū„šŠåóäė���Īó═Żų╣�����Īó─Ż╩Į┐žųŲ║═╝▒═Ż░┤Ōo��Ż¼┐╔īŹ¼F(xi©żn)ī”įOéõ▀\ąą▓┘ū„����Ż¼╠ß╣®╣╩šŽ╝░įOéõ▀\ąąĀŅæB(t©żi)ųĖ╩Š¤¶�Ż¼╠ß╣®ČÓéĆ╣╩šŽįOų├³cŻ¼┐╔─ŻöM▓╗═¼ŪķørŽ┬Ą─╣╩šŽ�����Ż¼╠ß╣®ČÓéĆļŖ┬Ęą┼╠¢╝░ÜŌ┬Ęą┼╠¢Ą─┐ņĮė▓Õ┐┌�����ĪŻ
Ż© 2 Ż®╚╦ÖCĮ╗╗źĮė┐┌����Ż¼’@╩ŠŲ„×ķĪ▌ 7 ėó┤ń TFT ����Ż¼Ęų▒µ┬╩Ī▌ 800 Ī┴ 480 �Ż¼┴┴Č╚Ī▌ 350 Ż¼ī”▒╚Č╚ 500:1 ���Ż¼▒│╣ŌŅÉą═ LED �Ż¼ė|┐ž├µ░ÕŅÉą═×ķĪ▌ 4 ŠĆļŖūĶ╩Į�Ż¼ Flash ┤µā”Ų„Ī▌ 120MB Ż¼ DRAM ×ķĪ▌ 64MB �Ż¼╠Ä└ĒŲ„×ķĪ▌ 32Bit RISC CPU ©R 400MHz Ż¼╠ß╣® RS-232 ║═ RS-485 ┤«ąąĮė┐┌���ĪŻ
13. ┐é┐žŽĄĮy(t©»ng) 1 ╠ū
Ż© 1 Ż®▓╔ė├Ė▀ąį─▄ PLC īŹ¼F(xi©żn)╝»│╔┐žųŲ����ĪŻ
Ż© 2 Ż®▓┘ū„▀^│╠┐╔═©▀^özŽ±Ņ^▓╔╝»ėøõø��Ż¼Į╣ŠÓ 2.8mm ��Ż¼Į╣Č╬ÅVĮŪ����Ż¼ŪÕ╬·Č╚Ī▌ 720p ����Ż¼Ėą╣Ō├µĘeĪ▌ 1/3 ėó┤ń���ĪŻ
Ż© 3 Ż®╣®ÜŌŽĄĮy(t©»ng)╣”┬╩Ī▌ 600W Ż¼┼┼ÜŌ┴┐ 118L/min Ī└ 8 L/min ��Ż¼ūŅ┤¾ē║┴” 8bar �����Ż¼ā”ÜŌ╣▐Ī▌ 24L
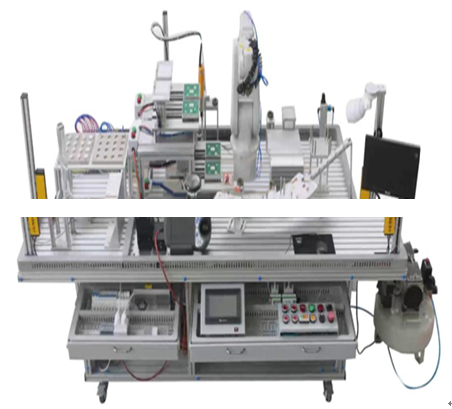
14. ╣żū„┼_╝▄ 1 ┼_
Ż© 1 Ż®õX║ŽĮ┐“╝▄����Ż¼ėąÖC▓Ż┴¦ķTŻ¼╠╝õōŌkĮé╚░Õ╝░Ąū░Õ��Ż¼š²├µ║═▒│├µ┐╔┤“ķ_┤µĘ┼įOéõ╝░╬’ŲĘ�����ĪŻ
Ż© 2 Ż®š¹¾w│▀┤ńĪ▌Ż© 2200mm Ī┴ 1350mm Ī┴ 700mm Ż®
Ż© 3 Ż®░▓čb┼_├µ×ķõX║ŽĮ T ą═▓█���Ż¼┼_├µ│▀┤ńĪ▌Ż© 2100mm Ī┴ 1100mm Ż®�Ż¼║±Č╚Ī▌ 20mm ĪŻ
Ż© 4 Ż®Ąū▓┐░▓čbėą┐╔µi╦└╚fŽ“─_▌å║═╣╠Č©ų¦ō╬���ĪŻ
15. ┼õ╠ū╣żŠ▀ 1 ╠ū
╠ß╣®░▓čb��Īóš{įć╣żū„šŠ╦∙ąĶ╣żŠ▀ę╗╠ū��Ż¼░³└©Ż║╣żŠ▀Žõ 1 éĆ�Īóā╚┴∙ĮŪ░Ō╩ų 1 ╠ū����Īó 250mm ╗Ņäė░Ō╩ų 1 ░čĪó 17mm/19mm ķ_┐┌░Ō╩ų 1 ░č���Īó 13mm ķ_┐┌░Ō╩ų 1 ░č��Īó 5.5mm ķ_┐┌░Ō╩ų 1 ░č��Īó┬▌ĮzĄČ 1 ╠ū���Īó 5 ├ūŠĒ│▀ 1 éĆĪóą▒┐┌ŃQ 1 ░č���Īó Y ą═Č╦ūėŃQ 1 ░č�����Īó┬ŃČ╦ą═Č╦ūėŃQ 1 ░č���ĪóäāŠĆŃQ 1 ░č����Īó├└╣żĄČ 1 ░č��Īó╚fė├▒Ē 1 éĆ�Īó PLC ŠÄ│╠ŠĆ 1 Ė∙�Īóė|├■Ų┴ŠÄ│╠ŠĆ 1 Ė∙Īó│╠ą“┐ĮžÉ U ▒P 1 éĆ�Ż╗╝░Ųõ╦¹▒žéõ╣żŠ▀ĪŻ
16. ļxŠĆŠÄ│╠▄ø╝■ 5 ╠ūįö╝Ü╝╝ągģóöĄę¬Ū¾
Ī’Ż© 1 Ż®Š▀ėąš²░µ▄ø╝■�����Ż¼ųą╬─Įń├µ�Ż¼┐╔╠ß╣®│ų└m(x©┤)Ą─ųą╬─╝╝ągų¦│ųĘ■䚯¼▄ø╝■┐╔╩╣ė├╦∙ėą╣”─▄─ŻēK�����Ż¼Įń├µ¤oĪ░įćė├░µĪ▒ūųśėŻ╗
Ī’Ż© 2 Ż®┐╔īŹ¼F(xi©żn)ČÓéĆŲĘ┼Ų��ĪóČÓéĆą═╠¢Ą─╣żśI(y©©)ÖCŲ„╚╦▀Mąą─Żą═ī¦╚ļ�Īó▄ē█EęÄ(gu©®)äØĪó▀\äėĘ┬šµ║═┐žųŲ┤·┤a▌ö│÷����Ż¼īŹ¼F(xi©żn)ļxŠĆŠÄ│╠Ż©ģó┐╝ŲĘ┼Ų ABB Īó KUKA �Īó░▓┤©Īó░l(f©Ī)─Ū┐Ų����Īó Staubli ĪóÅVų▌öĄ┐ž���Īóą┬Ģr▀_Ą╚Ż®��Ż╗
Ī’Ż© 3 Ż®▄ē█E╔·│╔╗∙ė┌ CAD öĄō■��Ż¼║å╗»▄ē█E╔·│╔▀^│╠�Ż¼╠ßĖ▀Š½Č╚��Ż¼┐╔└¹ė├īŹ¾w─Żą═ĪóŪ·├µ╗“Ū·ŠĆų▒Įė╔·│╔▀\äė▄ē█E���Ż╗
Ż© 4 Ż®ų¦│ųČÓ▌SÖCŲ„╚╦Ą─▀\äė�ĪóĘ┬šµ�����Ż¼╚ń 4 ▌S����Īó 6 ▌SĪó 8 ▌S��Īó 10 ▌SĄ╚���Ż╗
Ż© 5 Ż®ų¦│ųūā╬╗ŖAŠ▀įOČ©ČÓĘNūź╚Īū╦æB(t©żi)ĪŻ╚ń┐╔ęįīóę╗éĆūā╬╗ŖAŠ▀Č©┴x│╔ų▒��ĪóÅØā╔ĘNĀŅæB(t©żi)�ĪŻ
Ż© 6 Ż®╔·│╔Ą─▄ē█E┐╔▀MąąĘųĮM╣▄└ĒĪŻĘųĮM║¾��Ż¼┐╔ī”▄ē█EĮM▀Mąąūóßī���Īóäh│²Ą╚��Ż¼īŹ¼F(xi©żn)ī”ŽÓ╦Ų▄ē█EĄ─Įy(t©»ng)ę╗▓┘ū„���Ż╗
Ż© 7 Ż®┐╔īŹ¼F(xi©żn)īóŠÄ│╠ĮY╣¹Ę┬šµ▀\ąą▓ó▌ö│÷ 3D Ę┬šµ����Ż¼╔Žé„įŲČ╦ūįäė╔·│╔Č■ŠS┤a╝░µ£Įė�����Ż¼┐╔ė├╩ųÖCÆ▀├ĶČ■ŠS┤a║¾▓ķ┐┤įōäė«ŗ��Ī��Ż╗“Å═ųŲµ£Įė║¾����Ż¼═©▀^×gė[Ų„ų▒Įė▓źĘ┼Ż╗
Ż© 8 Ż®╠ß╣®ūįČ©┴x║¾ų├═©ė├ųĖ┴ŅÄņ��ĪŻūįČ©┴xÖCŲ„╚╦Ģr�����Ż¼┐╔ė├śI(y©©)Įń┴„ąąĄ─═Žū¦ĘĮ╩ĮČ©┴x║¾ų├Ė±╩ĮŻ╗┐╔Ė∙ō■ÖCŲ„╚╦ŲĘ┼Ų▀xō±ŽÓæ¬Ą─║¾ų├┤·┤a─Ż░Õ�����Ż¼Č©┴x╔·│╔┤·┤a▓óīŹĢrŅA’@���ĪŻ╚ń ABB �����Īó KUKA �Īó YASKAWA �����ĪóÅVų▌öĄ┐ž����Īóą┬Ģr▀_�����Ż╗
Ż© 9 Ż®░³║¼╣Ø(ji©”)┼─Įy(t©»ng)ėŗĘų╬÷╣”─▄���Ī�Ż┐╔Įy(t©»ng)ėŗÖCŲ„╚╦▀\ąąĄ─╚½│╠ĢrķgĪó╣Ø(ji©”)┼─��Īó▀\äėĄ─ŲĮŠ∙╦┘Č╚�����Īó┐éŠÓļx����Īó┐é▄ē█E³cöĄĄ╚ą┼ŽóŻ¼ĘĮ▒Ńė├æ¶įu╣└ÖCŲ„╚╦╣żū„ą¦┬╩��Ż╗
Ż© 10 Ż®ų¦│ųÖCŲ„╚╦╚²ŠSĘ┬šµ║═║¾ų├┤·┤aĘųŲ┴═¼▓Įš{įć▀\ąą�����Ż¼┐╔īŹĢr▒O(ji©Īn)┐žĘ┬šµą¦╣¹�ĪŻ▓ó┐╔’@╩ŠŠÄ│╠┤·┤aĄ─ąą╠¢Ż¼öĄūų�����Īóūóßī�ĪóųĖ┴ŅĄ╚���Ż╗
Ż© 11 Ż®Š▀éõ▄ē█Eā×(y©Łu)╗»╣”─▄Ż¼═©▀^łDą╬╗»ĘĮ╩Įš╣╩ŠÖCŲ„╚╦╣żū„Ą─ūŅā×(y©Łu)ģ^(q©▒)ė“����Ż¼▓ó═©▀^š{š¹Ū·ŠĆūīÖCŲ„╚╦╠Äė┌╣żū„ūŅā×(y©Łu)ģ^(q©▒)ā╚Ż¼ĮŌøQ▓╗┐╔▀_���Īó▌S│¼Ž▐║═Ųµ«É³cĄ─å¢Ņ}���Ż╗
Ż© 12 Ż®ų¦│ų▄ē█EŠÄ▌ŗ╣”─▄Ż¼ęįłDą╬╗»ĘĮ╩Į═©▀^═ŽäėģóöĄŪ·ŠĆ�Ż¼üĒŠÄ▌ŗę╗Śl▄ē█EųąųĖČ©éĆöĄĄ─³cŻ¼▀_ĄĮūīš¹Śl▄ē█E╣Ō╗¼▀^Č╔Ą─ą¦╣¹�����Ż╗
Ż© 13 Ż®Š▀éõęįĢrķg▌S×ķš╣╩ŠĘĮ╩Įų«ę╗Ą─Ę┬šµ╣▄└Ē├µ░Õ��ĪŻęįĢrķg▌SĄ─ĘĮ╩Į═¼Ģrš╣╩ŠČÓéĆÖCŲ„╚╦║═▀\äėÖCśŗĄ─▀\äėĢrą“��Ż¼¾w¼F(xi©żn)ŽÓ╗źĄ╚┤²ĻPŽĄ║═├┐Śl▄ē█E▀\ąąĄ─Ųų╣Ģrķg��Īó▀\ąą▀MČ╚Ą╚�����Ż╗
Ż© 14 Ż®į┌│╠ą“įOėŗ���ĪóĘ┬šµ▀^│╠ā╔ĘN─Ż╩Įųą���Ż¼┐╔╚½Ų┴═╗│÷’@╩ŠįOėŗŁh(hu©ón)Š│Ą─└LłDģ^(q©▒)ā╚Ą──Żą═ĪŻ
Ż© 15 Ż®ų¦│ųÖCŲ„╚╦į┌ŠĆ▓ķšę�ĪŻ┐╔ęįų▒ĮėÅ─įŲČ╦ÖCŲ„╚╦Äņųą▀xō±ÖCŲ„╚╦ , ī¦╚ļ▒ŠĄžĘ┬šµ▄ø╝■ŽĄĮy(t©»ng)▀MąąļxŠĆŠÄ│╠�Ż¼▀xō±▀^│╠ųąų¦│ų╦č╦„Īó║Y▀x║═┼┼ą“�Ż¼▓ó═Ų╦]ŽÓ╦ŲģóöĄĄ─ÖCŲ„╚╦╣®ė├æ¶▀xō±Ż╗
Ż© 16 Ż®Š▀éõīŻśI(y©©)Ą─║¾ų├┤·┤aŠÄ▌ŗŲ„���ĪŻ║¾ų├┤·┤aŠÄ▌ŗŲ„┐╔ęį’@╩Š┤·┤aĄ─ąą╠¢�����Ż¼öĄūų���Īóūóßī║═ųĖ┴ŅĄ╚ĻPµIūųęį▓╗═¼Ņü╔½’@╩ŠŻ╗║»öĄį┌ŠÄ▌ŗ▀^│╠ųąėąģóöĄ╠ß╩Š�����Ż╗║»öĄ║═ūóßī┐╔š█»Bļ[▓žĪŻ
Ż© 17 Ż®Š▀ėą┘NłD╣”─▄�Ż¼┐╔═©▀^┘NłD┤·╠µ╗“║å╗»ļxŠĆŠÄ│╠▄ø╝■╠ōöMł÷Š░ųąÅ═ļsĄ──Żą═┤ŅĮ©Ż¼ūŅ┤¾Ž▐Č╚£pąĪ─Żą═Ą─┤¾ą���Ī�Ż╗┐╔śO┤¾╝ė┐ņ└LłDģ^(q©▒)Ą─╦óą┬ļ╦┘┬╩����Ż¼╩╣└LłDģ^(q©▒)▓┘ū„Ēææ¬Ė³╝ėņ`├¶ĪŻ
Ż© 18 Ż®▄ø╝■╝»│╔ČÓŅÉą═�����ĪóČÓąąśI(y©©)į┌ŠĆ╣żū„šŠ�Ż╗╝»│╔▓┐Ęų╚½ć°┬ÜśI(y©©)į║ąŻ╝╝─▄┤¾┘ÉĄ─╣żū„šŠŻ¼ĘĮ▒Ńį┌ŠĆ─ŻöMė¢ŠÜ�����Ż╗
Ż© 19 Ż®┐╔īŹ¼F(xi©żn)▄ø╝■å¢Ņ}Į╗┴„į┌ŠĆ╗»�Ż╗ū„ŲĘĘųŽĒš╣╩Šį┌ŠĆ╗»Ż╗▄ø╝■į┌ŠĆ┘Yį┤Ė³ą┬īŹĢr╗»
Ż© 20 Ż®┐╔└¹ė├ 3D ³cįŲöĄō■��Ż¼╩╣įOėŗŁh(hu©ón)Š│║═šµÖCŁh(hu©ón)Š│ā╚ÖCŲ„╚╦��Īó╣żŠ▀���Īó▒╗╝ė╣ż┴Ń▓┐╝■ų«ķgĄ─┐šķg╬╗ų├ĻPŽĄ▒Ż│ųę╗ų┬�Ż¼īŹ¼F(xi©żn)Ė▀Š½Č╚ąŻ£╩����ĪŻ
Ż© 21 Ż®ų¦│ųĘ┬šµĢr’@╩Š▒ŲšµĄ─╝ė╣żą¦╣¹ĪŻ
Ż© 22 Ż®ŽĄĮy(t©»ng)ķ_Ę┼Ąūīė╦ŃĘ©╝░ API ║»öĄų¦│ųė├æ¶Č©ųŲŻ©Č■┤╬ķ_░l(f©Ī)Ż® VR īŹė¢ĒŚ─┐░Ė└²
Ż© 23 Ż®ŽĄĮy(t©»ng)ķ_Ę┼Ąūīė╦ŃĘ©┼c API ║»öĄ���Ż¼┐╔öUš╣▀BŠĆīŹ¾wÖCŲ„╚╦ū÷īŹĢr═¼▓ĮĘ┬šµ���Ż¼ų¦│ų╠ōöMŁh(hu©ón)Š│ÖCŲ„╚╦┼cīŹ¾wÖCŲ„╚╦═¼▓Įäėū„╣”─▄Ż¼ØMūŃė├æ¶Č©ųŲŻ©Č■┤╬ķ_░l(f©Ī)Ż®öĄūųī\╔·æ¬ė├ĒŚ─┐ŽĄĮy(t©»ng)����ĪŻ
17. įŲųŪ─▄īŹ“×╩ę░▓╚½╣▄└ĒŽĄĮy(t©»ng)
▒ŠŲĮ┼_īó ¤oŠĆé„▌ö Īóą┼Žó╠Ä└ĒĄ╚ ╬’┬ō(li©ón)ŠW╝╝ąg æ¬ė├ė├ė┌ūįäė╗»▀h│╠┐žųŲ����ĪŻįOéõČ╦▀\ąąĀŅæB(t©żi)ĪóöĄō■ģóöĄĄ╚╔Žé„ų┴įŲŲĮ┼_���ĪŻ ╬’┬ō(li©ón)ŠW ŽĄĮy(t©»ng)Ą─é„Ėąīė���Īóé„▌öīė║═æ¬ė├īėĻP┬ō(li©ón)šŲ╬šöĄō■┼cĘų╬÷öĄō■�ĪŻ
• ļŖē║����ĪóļŖ┴„Ą╚─ŻöM┴┐öĄō■’@╩ŠĪŻ
• ▌ö╚ļķ_ĻP▒O(ji©Īn)┐ž���Ż¼▌ö│÷ķ_ĻPĄ╚öĄūų┴┐┐žųŲ����ĪŻ
• ▀h│╠┐žųŲåó═ŻĀŅæB(t©żi)�����Ż¼ĮoČ©▌ö│÷ļŖē║ųĄĄ─�ĪŻ
• ’@╩Š▌ö╚ļ▌ö│÷ļŖē║ųĄĄ─Üv╩ĘöĄō■
• ┐╔░┤šš╚šŲ┌Īó╚šķg▀Mąą▓ķįāÜv╩ĘöĄ▀Mąą▓ķįā����ĪŻ
• ł¾Š»ą┼╠¢×ķ PLC ų„ÖC─ŻöM┴┐▓╔╝»öĄųĄ╗“š▀ķ_ĻP┴┐┐╔ęįūįė╔įOČ©Ż¼╚ń«ö─ŻöM┴┐▌ö╚ļ│¼▀^įOČ©ļŖē║Ģr«a╔·ł¾Š»Ż¼═©▀^╬’┬ō(li©ón)ŠWūįäė╗»æ¬ė├▄ø╝■īół¾Š»ą┼╠¢╔Žé„ĄĮįŲŲĮ┼_��Ż¼═©▀^įŲŲĮ┼_Ž“įOų├Ą─ĮKČ╦═Ų╦═ł¾Š»ą┼╠¢����Ż¼├┐┼_įOéõ┐╔ī”æ¬ČÓéĆĮKČ╦įOéõ���ĪŻ
• ═©▀^╩ųÖCČ╦┐╔ęįīŹ¼F(xi©żn)▀h│╠┐žųŲ PLC Ą─▌ö│÷╝░▒O(ji©Īn)ęĢ PLC Ą─▌ö╚ļĀŅæB(t©żi)ūā╗»�ĪŻ
• öĄō■’@╩Š«ŗ├µŻ║«ŗ├µ’@╩Š▌ö╚ļļŖē║öĄųĄ�Ż¼▌ö│÷ļŖē║▒O(ji©Īn)┐žŻ¼ķ_ĻPĀŅæB(t©żi)▌ö╚ļ���Ż¼ķ_ĻP┐žųŲ▌ö│÷����Ż¼ęį╝░įŲČ╦▀BĮėČ■ŠS┤a���ĪŻ
• ┬ō(li©ón)ŠWįOų├Įń├µŻ║įOų├¼F(xi©żn)ł÷öĄō■▀BĮėįŲŲĮ┼_║¾┼_öĄō■Äņ╣▄└Ē���ĪŻ
Ī’ ąĶ╠ß╣®įŲųŪ─▄īŹ“×╩ę░▓╚½╣▄└ĒŽĄĮy(t©»ng)▄ø╝■ų°ū„ÖÓūCĢ°įŁ╝■éõ▓ķŻ¼▓ó¼F(xi©żn)ł÷č▌╩Š 1-3 ĒŚ╣”─▄ęĢŅl �����ĪŻ
18. īŹ“×╩ęųŪ─▄ļŖį┤╣▄└ĒŽĄĮy(t©»ng)
īŹė¢╩ę┐é¾wųŪ─▄ļŖį┤╣▄└ĒŽĄĮy(t©»ng)ė╔ų„ļŖ┬ĘĪó┐žųŲļŖ┬Ę���ĪóÖz£y▒ŻūoļŖ┬Ę��Īó’@╩ŠļŖ┬Ę�����ĪóšZ궳¾Š»ļŖ┬ĘĄ╚ĮM│╔��Ż¼š¹éĆīŹ“×╩ę┼õų├ę╗╠ū╣▄└ĒŽĄĮy(t©»ng)�ĪŻ
ų„ę¬╣”─▄Ż║
18.1 ╔ŽļŖŽĄĮy(t©»ng)ūį£y
Ż© 1 Ż®ų„ļŖ┬Ę╝░┐žųŲļŖ┬Ę╔ŽļŖ║¾ī”ŠĆ┬ĘŽĄĮy(t©»ng)▀Mąą▌ö╚ļļŖē║Ą─▀^ē║��ĪóŪĘē║���Ż╗ŠĆ┬Ęī”Ąž┬®ļŖ�����Ż╗▌ö│÷žō▌d▀^┴„Ą─Öz£y�����Ż¼╚╬ę╗╣╩šŽ┤µį┌ļŖį┤▌ö│÷öÓķ_�����ĪŻ
Ż© 2 Ż®╣╩šŽā╚╚▌ėąŽÓæ¬╬─ūų’@╩Š�����ĪŻ
Ż© 3 Ż®ī”╣╩šŽ▀MąąšZ궳¾Š»�����ĪŻ
18.2 ▀\ąąÖz£y▒Żūo
Ż© 1 Ż®▌ö╚ļ▀^ē║�ĪóŪĘē║�Īó▌ö│÷▀^┴„Īó┬®ļŖ���Ż¼╚╬ę╗╣╩šŽ│÷¼F(xi©żn)īóūįäė╠°ķl�����Ż¼īŹ╩®▒Żūo��ĪŻ
Ż© 2 Ż®ī”╣╩šŽ▀MąąšZ궳¾Š»���ĪŻ
Ż© 3 Ż®▒ŻūoķyųĄ┐╔▀Mąą¼F(xi©żn)ł÷įOų├�����ĪŻ
18.3 ┬®ļŖ╣”─▄£yįć
Ż© 1 Ż®░┤Ž┬┬®ļŖ£yįć░┤Ōo��Ż¼čbų├Ģ■ūįäė╠ß╣®ę╗éĆ┬®ļŖ£yįćą┼╠¢�����Ż¼╩╣▒ŻūoŲ„╠°ķl��ĪŻ
Ż© 2 Ż®ųžą┬▀Mąą╔ŽļŖ▀M╚ļūį╝║Öz£yĀŅæB(t©żi)�Ż¼╬─ūų’@╩ŠĪ░ķ_ÖCÖz£yųą .... Ī▒��Ż¼¤o╣╩šŽŪķørŽ┬�����Ż¼īŹė¢╩ęųŪ─▄ļŖį┤╣▄└ĒŽĄĮy(t©»ng)╗ųÅ═╣®ļŖ��ĪŻ
18.4 ▀^ē║▒Żūo
Ż© 1 Ż®▀\ąąųą����Ż¼│÷¼F(xi©żn)▌ö╚ļ▀^ē║���Ż¼īŹė¢╩ęųŪ─▄ļŖį┤╣▄└ĒŽĄĮy(t©»ng)īó╠°ķlĪŻ
Ż© 2 Ż®ī”æ¬Ą─Ī░▀^ē║ŽÓĪ▒▀Mąą╬─ūų’@╩Š��ĪŻ
Ż© 3 Ż®šZę¶▓źł¾Ī░ŠĆ┬Ę▀^ē║����Ż¼šłūóęŌĪ▒ĪŻ
18.5 ▀^┴„▒Żūo
Ż© 1 Ż®▀\ąąųą�Ż¼╚²ŽÓļŖį┤ųą╚╬ę╗ŽÓ│÷¼F(xi©żn)▀^┴„Ż¼īŹė¢╩ęųŪ─▄ļŖį┤╣▄└ĒŽĄĮy(t©»ng)īó╠°ķl�ĪŻ
Ż© 2 Ż®ī”æ¬Ą─Ī░▀^┴„ŽÓĪ▒▀Mąą╬─ūų╠ß╩ŠĪŻ
Ż© 3 Ż®šZę¶▓źł¾Ī░ŠĆ┬Ę▀^┴„�Ż¼šłūóęŌĪ▒
18.6 ┬®ļŖ▒Żūo
Ż© 1 Ż®▀\ąąųą�����Ż¼╚²ŽÓųą╚╬ę╗ŽÓ│÷¼F(xi©żn)┬®ļŖ�����Ż¼īŹė¢╩ęųŪ─▄ļŖį┤╣▄└ĒŽĄĮy(t©»ng)īó╠°ķl�ĪŻ
Ż© 2 Ż®ī”Ī░┬®ļŖĪ▒▀Mąą╬─ūų’@╩ŠĪŻ
Ż© 3 Ż®šZę¶▓źł¾Ī░ŠĆ┬Ę┬®ļŖ��Ż¼šłūóęŌĪ▒ĪŻ
18.7 ļŖį┤▒O(ji©Īn)┐ž
Ż© 1 Ż®┐╔ī”Ė„ŽÓļŖē║▀MąąöĄųĄ’@╩Š╝░Ū·ŠĆ’@╩Š�Ż¼’@╩ŠŠ½Č╚Ī└ 5V
Ż© 2 Ż®┐╔ī”Ė„ŽÓļŖ┴„▀MąąöĄųĄ’@╩Š╝░Ū·ŠĆ’@╩ŠŻ¼’@╩ŠŠ½Č╚Ī└ 0.1A
Ż© 3 Ż®Ė▀ē║▒ŻūoļŖē║įOų├Ż║
ó┘įOų├ĘČć· <300V ����Ż¼▌ö╚ļ 1A;
ó┌äėū„ĢrķgŻ║ 2-5S Ż¼▌ö╚ļå╬╬╗ 0.1S
Ż© 4 Ż®ŪĘē║▒ŻūoļŖē║įOų├Ż║
ó┘įOų├ĘČć·Ż║ >154V ����Ż¼▌ö╚ļå╬╬╗ 1V
ó┌äėū„ĢrķgŻ║ 2-5S Ż¼▌ö╚ļå╬╬╗ 0.1S
(5) ▀^┴„▒ŻūoļŖ┴„įOų├Ż║
ó┘įOų├ĘČć·Ż║ <20A, ▌ö╚ļå╬╬╗ 0.01A;
ó┌äėū„ĢrķgŻ║ 0.5-2S �����Ż¼▌ö╚ļå╬╬╗ 0.1S
19. ╣żśI(y©©)ÖCŲ„╚╦šn│╠┘Yį┤
• ╣żśI(y©©)ÖCŲ„╚╦Ą─Ė┼╩÷Ż║╣żśI(y©©)ÖCŲ„╚╦Ą─Č©┴x���Īó░l(f©Ī)š╣┼cæ¬ė├�����Īó╗∙▒ŠĮM│╔╝░╝╝ągģóöĄ����Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ĘųŅÉ����Ż╗
• ╣żśI(y©©)ÖCŲ„╚╦Ą─ÖCąĄŽĄĮy(t©»ng)Ż║╣żśI(y©©)ÖCŲ„╚╦Ą─ 1 ▌SĮYśŗ�����Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ 2 ▌SĮYśŗ�Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ 3 ▌SĮYśŗ�����Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ 4 ▌SĮYśŗ�����Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ 5 ▌SĮYśŗ���Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ 6 ▌SĮYśŗ����Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ÖC╔ĒĮYśŗ���Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ąąū▀ĮYśŗĪó╣żśI(y©©)ÖCŲ„╚╦Ą─“īäėčbų├║═é„äėå╬į¬��Ż╗
• ╣żśI(y©©)ÖCŲ„╚╦Ą─▀\äėīW┼cäė┴”īWŻ║╣żśI(y©©)ÖCŲ„╚╦Ą─▀BŚUģóöĄ║═²R┤╬ū°ś╦ūāōQŠžĻćĪŻ
• ╣żśI(y©©)ÖCŲ„╚╦Ą─┐žųŲŽĄĮy(t©»ng)Ż║╣żśI(y©©)ÖCŲ„╚╦┐žųŲčbų├���Īó╣żśI(y©©)ÖCŲ„╚╦“īäėčbų├�Īó╣żśI(y©©)ÖCŲ„╚╦Öz£yčbų├����Ż╗
• ╣żśI(y©©)ÖCŲ„╚╦Ą─ŠÄ│╠Ż║╣żśI(y©©)ÖCŲ„╚╦Ą─ŠÄ│╠ĘĮ╩ĮĪó╣żśI(y©©)ÖCŲ„╚╦Ą─╩ŠĮ╠ŠÄ│╠���Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ŠÄ│╠šZčį�Īó╣żśI(y©©)ÖCŲ„╚╦Ą─šZčįŽĄĮy(t©»ng)ĮYśŗ║═╗∙▒Š╣”─▄�Īó│Żė├╣żśI(y©©)ÖCŲ„╚╦ŠÄ│╠šZčįĪó╣żśI(y©©)ÖCŲ„╚╦Ą─ļxŠĆŠÄ│╠���Īó╣żśI(y©©)ÖCŲ„╚╦Ą─ļxŠĆŠÄ│╠Ę┬šµ▄ø╝■╝░ŠÄ│╠╩Š└²����Ż╗
• ╣żśI(y©©)ÖCŲ„╚╦Ą─Ąõą═æ¬ė├Ż║║ĖĮėÖCŲ„╚╦Ą─æ¬ė├�Īó░ß▀\ÖCŲ„╚╦Ą─æ¬ė├Īó┤aČŌÖCŲ„╚╦Ą─æ¬ė├��Īó═┐čbÖCŲ„╚╦Ą─æ¬ė├���Īóčb┼õÖCŲ„╚╦Ą─æ¬ė├����Ż╗
• ╠ß╣®Ų¹▄ć╔·«aŠĆ╣żśI(y©©)ÖCŲ„╚╦æ¬ė├Ą─Ė▀ŪÕęĢŅlĪŻ
20.PLC ŠÄ│╠Į╠īWšn╝■┘Yį┤
Ż© 1 Ż® S7-1200PLC Ą─šJų¬Ż║ S7-1200PLC ║åĮķ�����Īó S7-1200PLC ╣żū„įŁ└Ē╝░▀\ąą─Ż╩Į�Īó S7-1200PLC ╠ž³cĪó S7-1200PLC öUš╣╣”─▄���Īó PLC æ¬ė├╝╝ąg╚╦▓┼┼ÓB(y©Żng)�����Ż╗
Ż© 2 Ż® TIA ▓®łD▄ø╝■Ą─╩╣ė├Ż║ TIA ▓®łD╝»│╔▄ø╝■ķ_░l(f©Ī)ŲĮ┼_���Īó TIA ▓®łD╝»│╔▄ø╝■║åĮķĪó╚ļķTīŹ└²�Ż╗
Ż© 3 Ż®┐žųŲå╬į¬Ą─│╠ą“įOėŗ���ĪóųĖ┴ŅŠÄīæ���Īóė▓╝■▀xą═║═įOėŗ��Īóšn║¾╦╝┐╝┼cŠÜ┴ĢĄ╚ā╚╚▌����ĪŻ─ŻēKų┴╔┘░³└©Ż║░╦┬Ęōī┤Ų„��Īó╚²ŽÓ«É▓ĮļŖÖCĄ─ąŪ╚²ĮŪĮĄē║åóäė�����Īó▀\┴ŽąĪ▄ć═∙ĘĄ┐žųŲ�����Īó╩«ūų┬Ę┐┌Į╗═©¤¶Ą─┐žųŲ���ĪóļŖäėÖCĮMĄ─åó═���Ż┐žųŲĪó HMI ┐žųŲę║¾w╗ņ║Ž����Īó G120 ūāŅlŲ„Ą─ļŖÖC┐žųŲ����ĪŻ
Ż© 4 Ż®ąĪą═ūįäė╗»╔·«aŠĆĄ─įOėŗ
šn╝■┘Yį┤Š▀ėą«aŲĘĄ─░ß▀\��ĪóÖz£y║═é„▌öĘųÆ■╣”─▄�����Ż¼š¹éĆŽĄĮy(t©»ng)ė╔╦═┴Žå╬į¬���ĪóÖCąĄ╩ų░ß▀\å╬į¬�����Īó▓Į▀MļŖÖCČÓ³cČ©╬╗▌ö╦═å╬į¬║═é„╦═Ħ▌ö╦═ĘųÆ■å╬į¬Ą╚ĮM│╔�����ĪŻŠ▀¾wĄ─ĒŚ─┐įOėŗę¬Ū¾╚ńŽ┬Ż║
1 Ż®▒ŠįOėŗĄ─ę¬Ū¾╩╣ė├═©▀^ė|├■Ų┴┼c┐žųŲ┼_░┤Ōo▓┘ū„����Ż¼┐žųŲ╔·«aŠĆĄ─ūįäė▀\ąą�����ĪŻ╔·«aŠĆ═©ļŖęį║¾��Ż¼ŽĄĮy(t©»ng)ūįąąÖz£y│§╩╝ĀŅæB(t©żi)╩ŪʱØMūŃ▀\ąąŚl╝■��Ż¼╚ń▓╗ØMūŃätūįąąÅ═╬╗╗“╩ųäėš{š¹���Ż¼╚¶ØMūŃätė|├■Ų┴’@╩Š£╩éõŠ═Šw����Ż╗
2 Ż®į┌£╩éõŠ═ŠwĄ─ŪķørŽ┬�����Ż¼░┤Ž┬åóäė░┤Ōo��Ż¼╔·«aŠĆķ_╩╝░┤Ēśą“▀\ąą���Ż¼╣®┴Žå╬į¬ķ_╩╝╣żū„���Ż¼ļŖÖC“īäė▐D▒Pīó╣ż╝■╦═ĄĮ╬’┴Ž┼_╔ŽŻ╗ļŖÖC▀\ąą 10 ├ļ║¾�����Ż¼╚¶╬’┴Ž┼_╣ŌļŖķ_ĻPø]ėąÖz£yĄĮ╬’┴ŽŻ¼šf├„ęčø]ėą╬’┴Ž���Ż¼ķ_╩╝ł¾Š»�Ż╗╚¶Öz£yĄĮ╬’┴Ž���Ż¼ätę╗╠¢░ß▀\ÖCąĄ╩ųķ_╩╝äėū„��Ż╗
3 Ż®╬’┴Ž┼_ėą┴Ž����Ż¼ę╗╠¢ÖCąĄ╩ų▒█╔ņ│÷▓óŽ┬ĮĄŖA╚Ī╣ż╝■�Ż¼ŖA╚ĪĄĮ╣ż╝■║¾ÖCąĄ╩ų╔Ž╔²┐s╗ž▓óą²▐DĄĮėęé╚Ž▐╬╗Ż╗╚╗║¾ÖCąĄ╩ų╔ņ│÷Ž┬ĮĄīó╣ż╝■Ę┼ĄĮ▓Į▀MļŖÖC▌ö╦═å╬į¬Ą─╣®┴Ž┼_╔Ž����Ż¼ę╗╠¢░ß▀\ÖCąĄ╩ų╗ųÅ═ĄĮ│§╩╝ĀŅæB(t©żi)Ż¼Ą╚┤²Ž┬ę╗┤╬▀\ąą���Ż╗
4 Ż®«ö▓Į▀MļŖÖC▌ö╦═å╬į¬é„ĖąŲ„Öz£yĄĮ╣®┴Ž┼_╣ż╝■║¾�Ż¼▓Į▀MļŖÖCŪ░═∙Ė▀Č╚Öz£yå╬į¬▀MąąÖz£y�����Ż╗ĄĮ▀_║¾═©▀^│¼┬Ģ▓©é„ĖąŲ„▀MąąĖ▀Č╚Öz£yŻ¼Öz£y═Ļ«ģ║¾����Ż╗▓Į▀MļŖÖC▀\ąąĄĮČ■╠¢░ß▀\ÖCąĄ╩ų╬╗ų├�Ż╗
5 Ż®ĄĮ▀_Č■╠¢░ß▀\ÖCąĄ╩ų╬╗ų├║¾Ż╗Č■╠¢░ß▀\ÖCąĄ╩ų╔ņ│÷����Īóū”ŖA╚Ī╣ż╝■Ż¼ÖC╝▄┼_╔Ž╔²�����Ż¼ą²▐DĄĮėęŽ▐╬╗����Ż¼╔ņ│÷╩ų▒█Ż¼ÖC╝▄┼_Ž┬ĮĄ��Ż¼╩ųū”Ę┼╦╔���Ż¼īó╣ż╝■Ę┼ĄĮé„╦═Ħ╔Ž��Ż¼═¼ĢrČ■╠¢░ß▀\ÖCąĄ╩ųÅ═╬╗�Ż╗
6 Ż®«öé„╦═Ħå╬į¬é„ĖąŲ„Öz£yĄĮ╣ż╝■ĢrŻ¼é„╦═Ħķ_╩╝╣żū„�����Ż¼Ė∙ō■╣ż╝■Ą─Ņü╔½���Īó▓─┴Ž▀MąąĘųÆ■�����Ż╗ĘųÆ■ĮY╩°║¾�Ż¼╣®┴Ž┼_╗žĄĮ╣®┴Ž╬╗ų├��Ż¼Ą╚┤²Ž┬ę╗┤╬▀\ąą���ĪŻ
Ż© 5 Ż®ė├æ¶╩ųāįŻ║░³└©┼c S7-1200 ���ĪóėąĻPė▓╝■Īó▄ø╝■║══©ą┼Ą─╩ųāį���Ż¼öĄ┴┐▓╗╔┘ė┌Č■╩«ČÓĘN�ĪŻ
šn╝■┘Yį┤╠ß╣®įö╝ÜĄ─┼õ╝■īŹ╬’łDŲ¼╝░ģóöĄ╣”─▄ĮķĮBĪóė▓╝■ĮM│╔łDĮŌ�Īó│╠ą“ųĖ┴ŅĪó│╠ą“įOėŗ�����ĪóÜŌäėįŁ└ĒłD���ĪóļŖÜŌįŁ└ĒłD�����Īóė▓╝■ĮMæB(t©żi)Ą╚Ż¼łD╬─▓ó├»����ĪŻ
|